User manual of EC160 elevator intelligent integrated machine Function parameters
137
A1 floor setting
A2 floor displaying
H0 logic of the IO control
board
H1 logic of the car control
board
H2 front door stopping
floor
H3 rear door stopping
floor
H4 front/ rear door
stopping floor
L0 parallel and group
control setting
T0 time setting
F0 function setting
U0 calling signal
U1 system monitoring
U2 hoistway information
10 times of the set value of U0_00 for random calling enabling is the random running time. It will be
cleared after powering off.
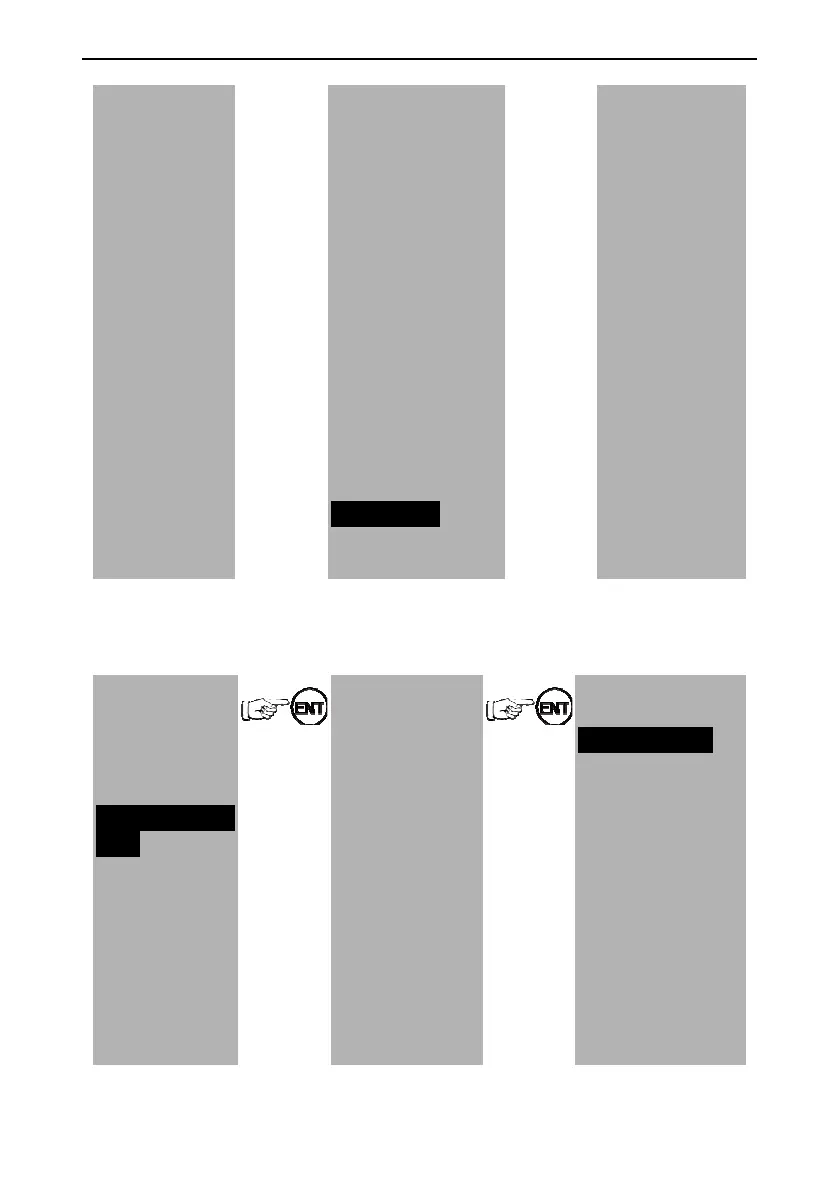
6.5.20 Parameters setting---system monitoring
【main menu】
A system control
B fault record
C language
selection
D parameters setting
inquiry
E password setting
F system autotuning
G data management
H system
information
【parameters setting
inquiry】
P0 master drive
control
P1 speed and
deceleration distance
P2 motor parameters
P3 encoder
parameters
P4 running
comfortability
P5 elevator protection
parameters
P6 communication
setting
【U1 system
monitoring】
Running time low bit
Running time high bit
Total running time low bit
Total running time high
bit
Current reference speed
of the elevator
Reference frequency
monitoring
Magnetic pole position
angle
Static autotuning
detection current

 Loading...
Loading...