User manual of EC160 elevator intelligent integrated machine Function parameters
92
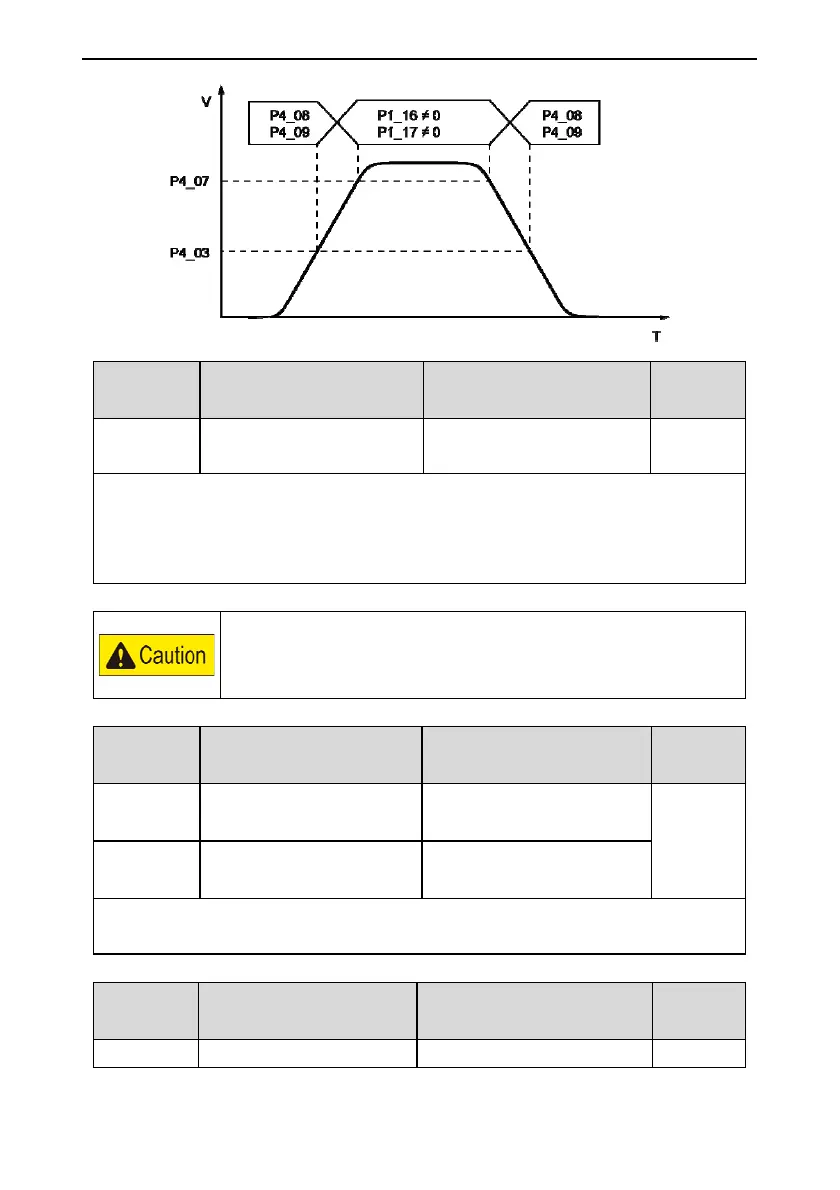
Figure 6-3 ACR switching
Function
code
Instruction Setting range【default value】 Remarks
P4_10 ACR filter coefficient 0-65535【3】
Not modify
in running
bit0~bit2 corresponds to the running torque command filter times, the Max. value: 7 (the default
value 3 means the filter time=2^3/carrier frequency).
bit3~bit5 corresponds to the starting torque command filter times, the Max. value: 7 (the default
value is 0). When the noise starts, try setting the value.
The parameter is combined setting. If it is necessary to set the running
torque command filter times to 2 and the starting torque command filter
times to 3, the parameter=2+3*8=26.
Function
code
Instruction Setting range【default value】 Remarks
P4_11
Slip compensation rate of drive
side
50~200%【100】
Not modify
in running
P4_12
Slip compensation rate of
braking side
50~200%【100】
The parameter is used to adjust the slip frequency of vector control and improve the precision of
speed control. Properly adjusting this parameter can effectively restrain the steady-state error.
Function
code
Instruction Setting range【default value】 Remarks
P4_13 Torque upper limit 0.0~200.0% (rated current) Not modify

 Loading...
Loading...