User manual of EC160 elevator intelligent integrated machine Function parameters
86
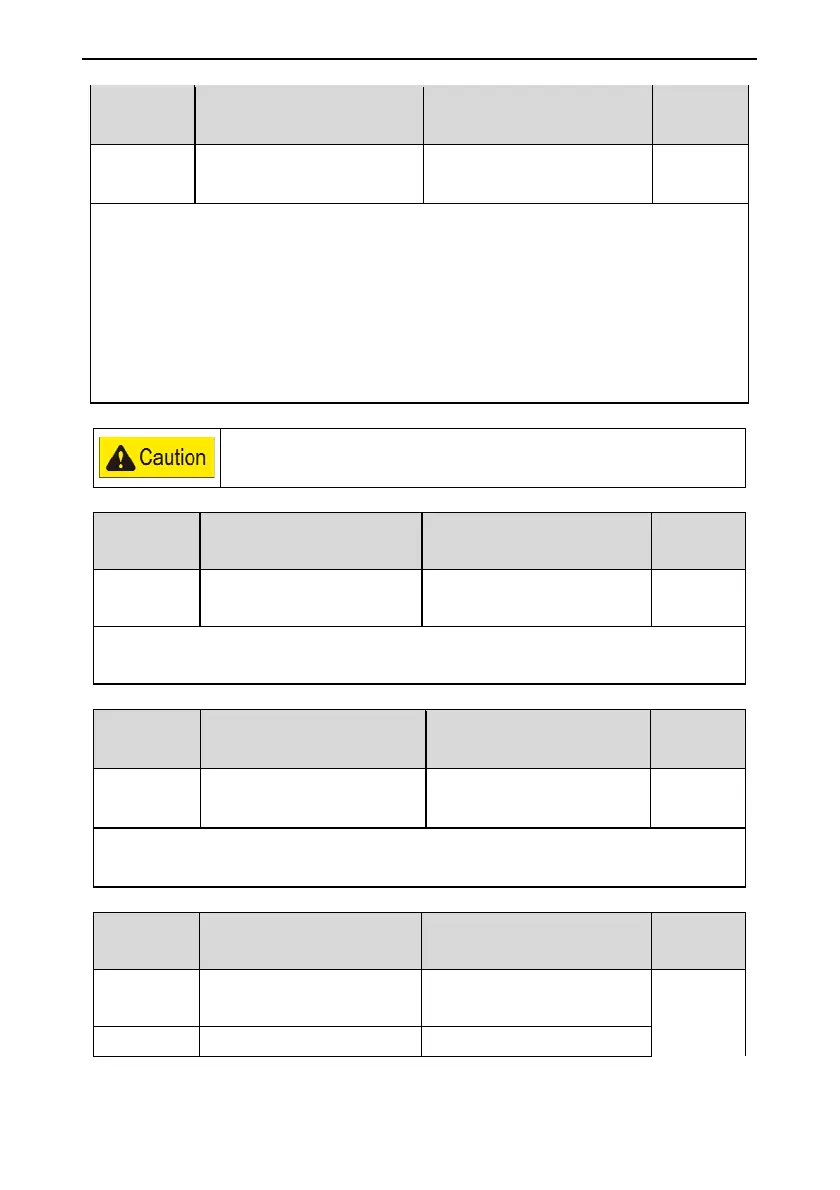
Function
code
Instruction Setting range【default value】 Remarks
P3_00 Encoder type selection 0-3【1】
Not modify
in running
Select the encoder type. Generally, the asynchronous master is set to 0 and applying I/O board
AJ2 encoder interface. The asynchronous master is set to be 1 and apply main control board CN3
encoder interface.
0: Incremental encoder (Asynchronous master)
1: SIN/COS encoder
2: UVW encoder
3: Endat encoder
When using Heidenhain 1313 encoder, it needs to select the encoder
type 3 and install Endat encoder PG card additionally.
Function
code
Instruction Setting range【default value】 Remarks
P3_01 Encoder resolution 1~10000【2048】
Not modify
in running
Set the pulse number of the encoder. The incorrect parameter make the master not work
normally.
Function
code
Instruction Setting range【default value】 Remarks
P3_02 Encoder direction 0-1【0】
Not modify
in running
In vector control mode, the parameter must be set correctly; otherwise, the motor cannot work
normally.
Function
code
Instruction Setting range【default value】 Remarks
P3_03
Disconnection detection time of
the encoder at low speed
0.0~10.0s【1.0】
Not modify
in running
P3_04 Disconnection detection time of 0.0~10.0s【1.0】

 Loading...
Loading...