User manual of EC160 elevator intelligent integrated machine Debugging at fast speed
162
8.9.7 Adjustment of weighing compensation
When the synchronous master adopts UVW encoder or pulley drives the asynchronous motor, the
device for weighing compensation will be necessary. If it is installed at the rope end of the engine
room, the compensation signal will be connected to AI1 and GND of EC160 main board, P4_24=2.
If it is installed on the weighing proximity switch at the car bottom, P4_24=1.
When OL voltage>FL voltage>LL voltage, set F0_17 bit1 to 1, that is, +2
on the original parameter.
If the OL and FL signals of the elevator adopt analog weighing voltage of car top board, EC160
autotuning at LL, FL and OL in sequence will be needed, as shown below:
1. Fix the weighing sensor approaching to the center of the bottom and place it in horizontal, about
20mm from the car bottom;
2. Set P4_23 to 1, P4_24 to 1;
3. In inspection, keep the car at light load, adjust the position of the sensor, and input voltage about
8V to car top board (monitor by checking analog input voltage of U1_32)
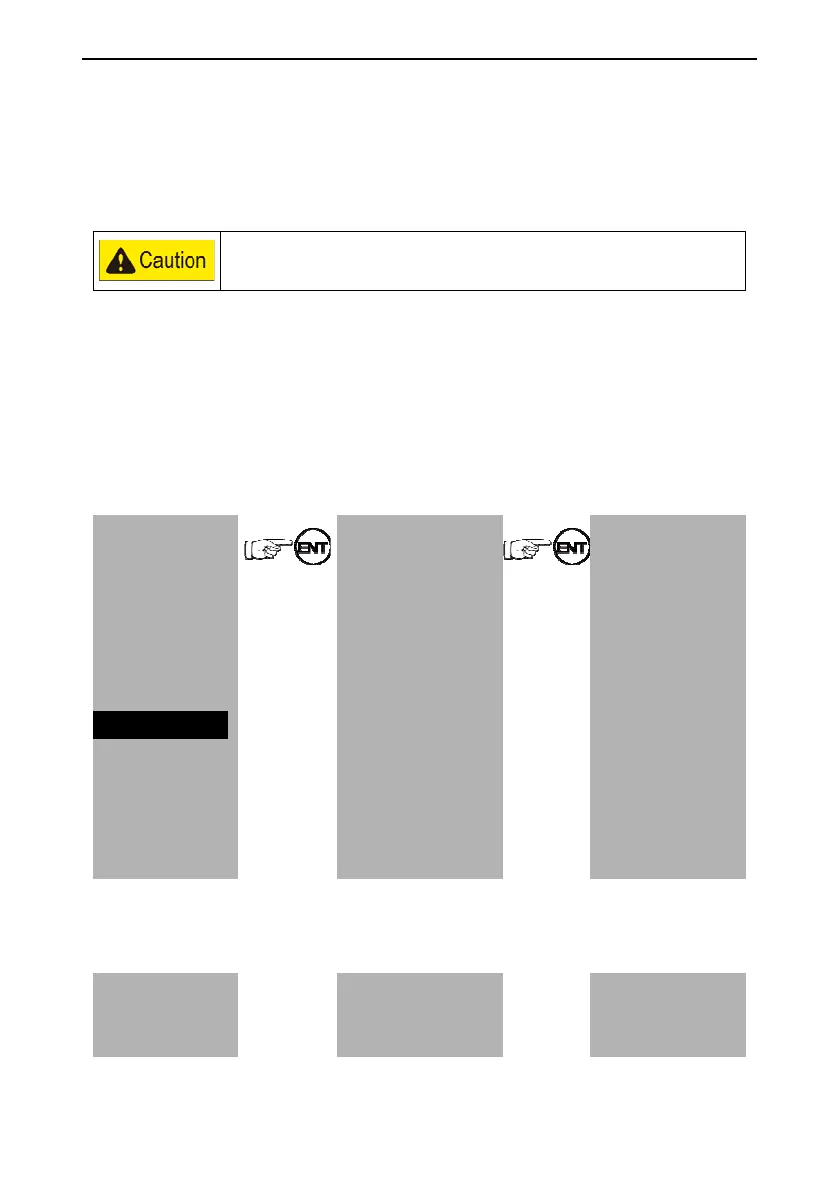
4. Enter into following setting interface. Data will be saved after finishing autotuning in sequence.
【main menu】
system control
B fault record
C language selection
D parameters setting
inquiry
E password setting
F system autotuning
G data management
H system information
【system autotuning】
[1] hoistway information
autotuning
[2] motor rotating
autotuning
[3] motor static
autotuning
[4] LL weighing
autotuning
[5] FL weighing
autotuning
[6] OL weighing
autotuning
【LL weighing
autotuning】
Whether in the
inspection state?
[Y] [N]
Select [Yes] to press
confirm button
Select [Yes] to press
confirm button
Select [Yes] to press
confirm button
【LL weighing
autotuning】
Please confirm the
【LL weighing
autotuning】
In autotuning
【LL weighing
autotuning】
utotuning succeeded

 Loading...
Loading...