124 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 5 Configure Integrated Motion Using a PowerFlex 755 Drive
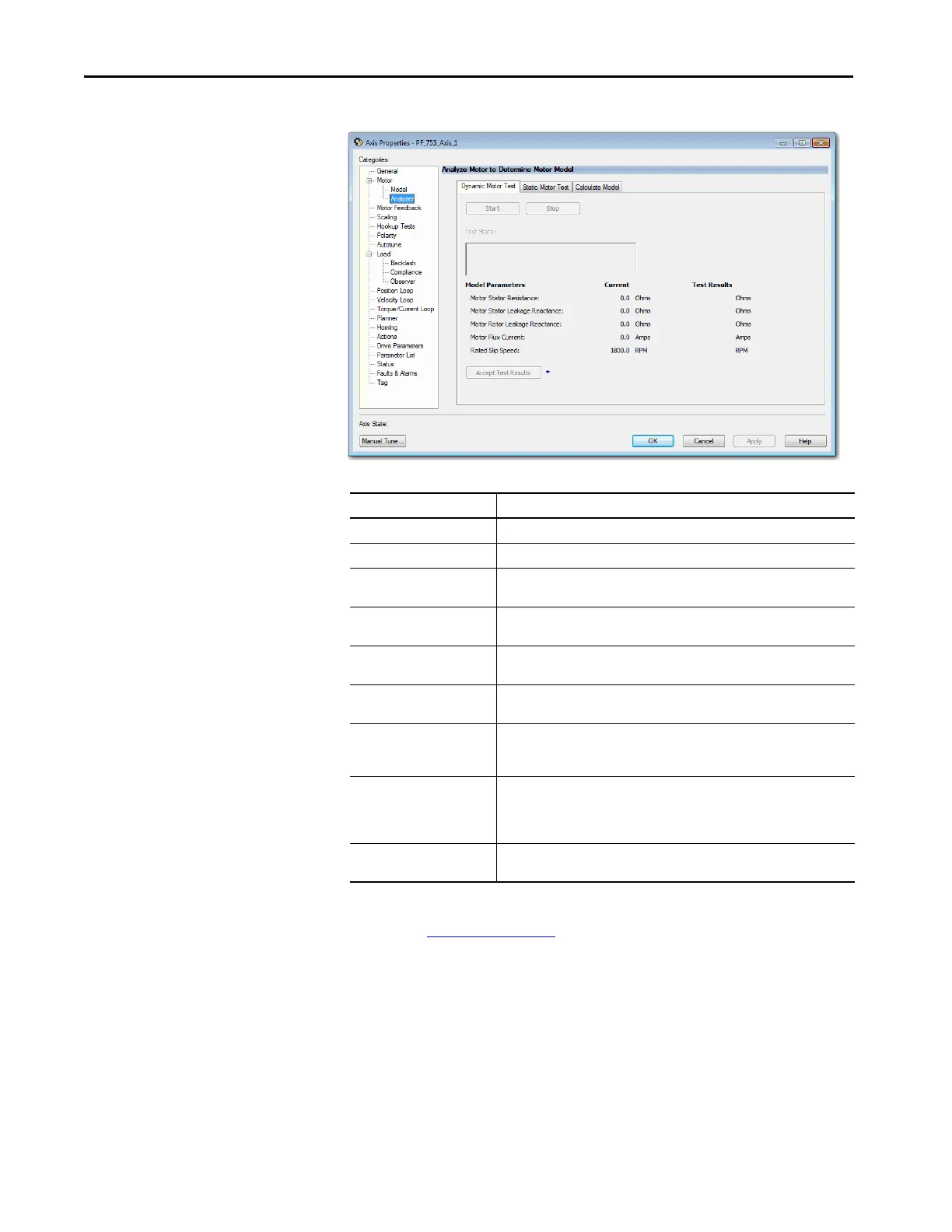
Figure 18 - Motor Analyzer Dialog Box
See the Integrated Motion on the EtherNet/IP Network Reference Manual,
publication MOTION-RM003
, for complete information on Axis Attributes
Motor Feedback.
Table 38 - Motor Analyzer Parameters
Parameter Description
Motor Resistance Specifies the phase-to-phase, resistance of a permanent magnet motor.
Motor Inductance Specifies the phase-to-phase, inductance of a permanent magnet motor.
Motor Rotary Voltage Constant Specifies the voltage, or back-EMF, constant of a rotary permanent-magnet
motor in phase-to-phase RMS Volts per KRPM.
Motor Stator Resistance Specifies the Y circuit, phase-neutral, winding resistance of the stator as shown as
R1 in the IEEE motor model.
Motor Stator Leakage
Reactance
Specifies the Y circuit, phase-neutral, leakage reactance of the stator winding, at
rated frequency, as shown as X1 in the IEEE motor model.
Motor Torque Constant Specifies the torque constant of a rotary permanent-magnet motor in Newton-
meters per RMS amp.
Motor Rotor Leakage
Reactance
Specifies the Y circuit, phase-neutral, equivalent stator-referenced leakage
inductance of the rotor winding, at rated frequency, as shown as X2 in the IEEE
motor model.
Motor Flux Current Id Current Reference that is required to generate full motor flux. The No Load
Motor Rated Current that is commonly found in Induction Motor data sheets
closely approximates the value of the Motor Flux Current.
The Kinetix 350 does not support this parameter.
Rated Slip Rated Slip is the amount of slip at motor rated current (full load) and motor rated
frequency.

 Loading...
Loading...











