172 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 8 Configuration Examples for a Kinetix Drive
Example 4: Kinetix 5500
Drive, Velocity Loop with
Motor Feedback
In this example, you are configuring a Kinetix 5500 servo drive, catalog number
2098-H025-ERS, with motor feedback by using a Rotary Permanent Magnet
motor, catalog number VPL-A1001M-P.
You must connect the Motor Feedback cable to the Motor Feedback port of
the Kinetix 5500 drive and then configure the feedback port.
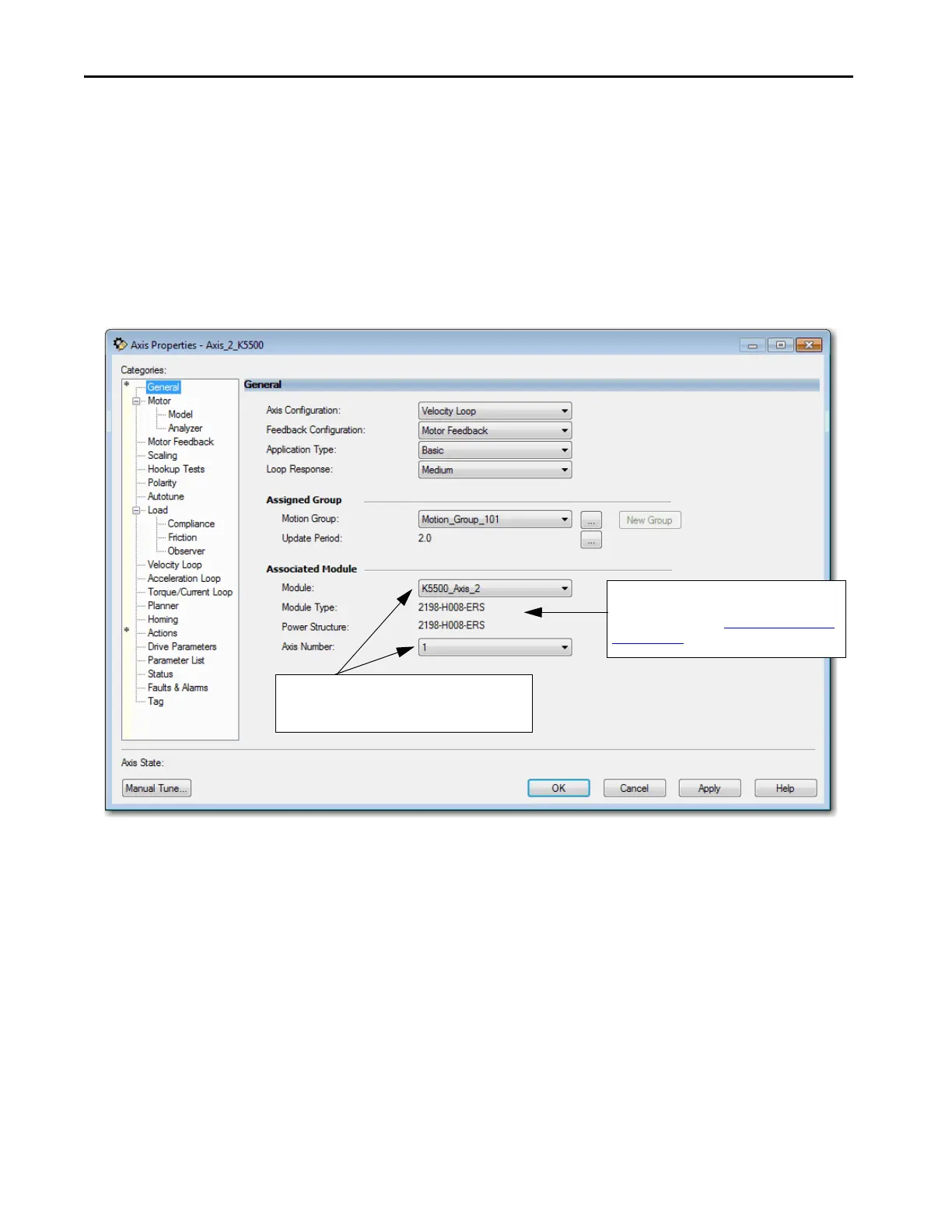
1. Once you have added the drive to your project and created an
AXIS_CIP_DRIVE, open the Axis Properties.
Figure 39 - Example 4: Velocity Loop with Motor Feedback, General Dialog Box
After you select Velocity Loop with Motor Feedback, the Motor and
Motor Feedback dialog boxes become available.
2. Click the Motor dialog box.
3. Choose Catalog Number as the Motor Data Source.
Displays the type of drive you selected the Kinetix
5500 Module Properties.
For more information, see Add a Kinetix EtherNet/IP
Drive on page 32.
The newly created Kinetix 5500 drive module name is
the default. The Axis Number defaults to 1, indicating
the axis of the drive.
TIP After you have configured the axis and you change the Axis Configuration
type or the Axis Number, some of the configuration information is set to
default values. This change can cause some previously entered data to be
reset back to its default setting.

 Loading...
Loading...











