242 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 11 Commission an Axis
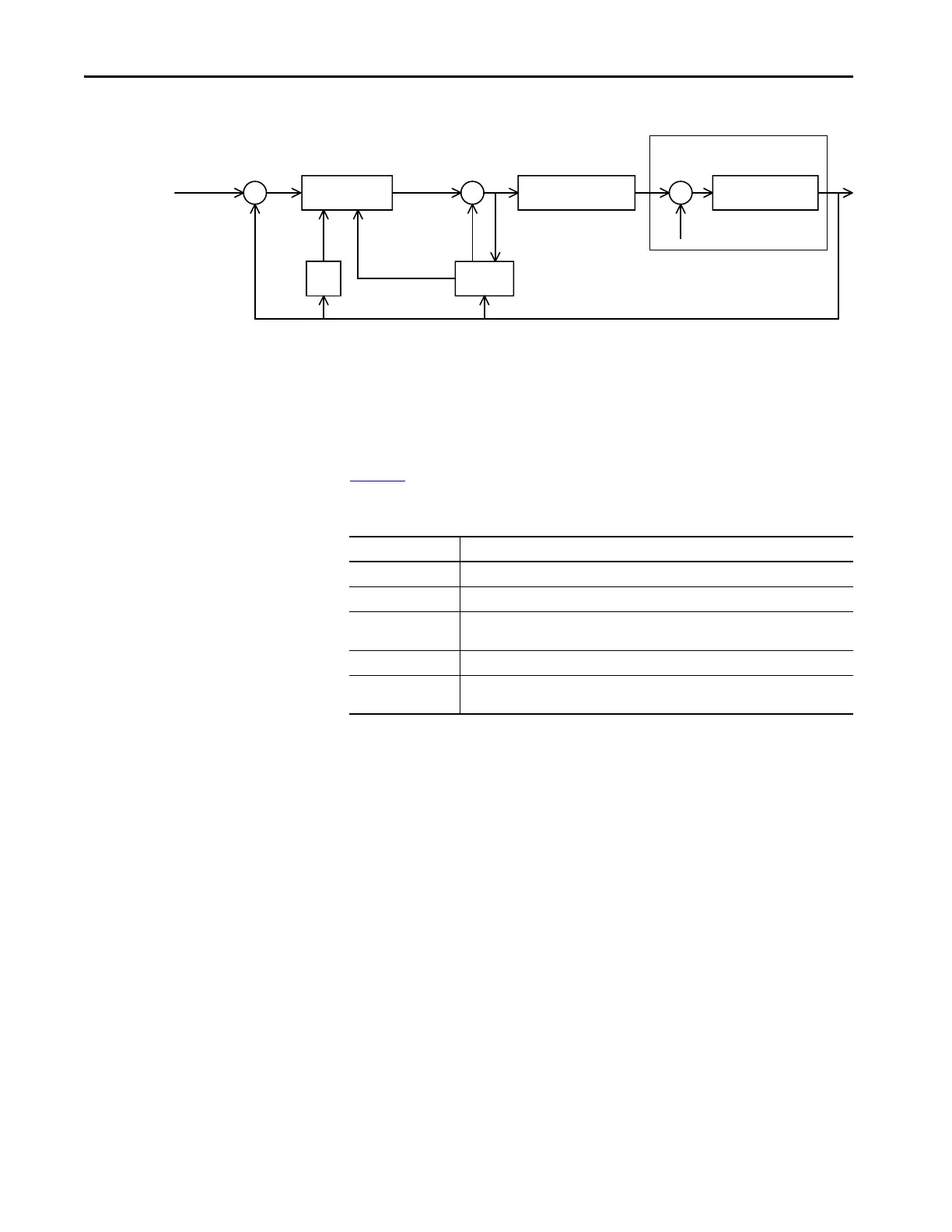
Figure 104 - Load Observer Block Diagram
The Load Observer also generates a Velocity Estimate signal that you can apply
to the velocity loop. The Velocity Estimate has less delay than the Velocity
Feedback signal derived from the actual feedback device. It also helps to reduce
high frequency output noise that the aggressive action of the Load Observer on
the acceleration reference causes. Together, Load Observer with Velocity
Estimate provides the best overall performance for positioning applications.
Table 49
describes the Load Observer configuration settings.
Load Observer Configuration
This section applies to only the Load Observer feature for the Kinetix 5500,
Kinetix 5700, and Kinetix 6500 drives. Click the Observer tab in the Axis
Properties dialog box. Here, the Load Observer mode can be selected with the
Configuration pull-down menu. See Table 27 for descriptions of each setting.
If Load Observer is enabled, the recommended Configuration setting is Load
Observer with Velocity Estimate for positioning applications. Access to Load
Observer bandwidth (Kop) and Load Observer Integral Bandwidth (Koi) is
also shown. Typically, Koi = 0.
Gains are limited to 500 Hz in drive firmware revision 2.160 and earlier. In
drive firmware revision 2.170 and later, the gain limits are increased to 10,430
Position
Command
Control Loops
Power Conversion
Unloaded Motor
Load
Observer
Fs
+
++
-
-
Acceleration Reference
Torque Estimate
Velocity Estimate
Torque Load
Mechanics
Servo Drive
Position Feedback
Table 49 - Load Observer Configuration Settings
Configuration Description
Disabled Load Observer is inactive.
Load Observer Only Provides a torque estimate only.
Load Observer with
Velocity Estimate
The standard Load Observer operation. Provides torque and velocity estimates.
Velocity Estimate Only Provides only a velocity estimate.
Acceleration Feedback Provides acceleration feedback by disconnecting the Acceleration Reference to the Load
Observer.

 Loading...
Loading...











