262 Rockwell Automation Publication MOTION-UM003K-EN-P - January 2019
Chapter 12 Homing
Absolute Position Recovery
(APR)
APR is the recovery of the absolute position of an axis that has been machine-
referenced after a power cycle or reconnection. The APR feature maintains the
machine reference or absolute position through power cycles, program
downloads, and even firmware updates under certain conditions. The terms
Absolute Position and Machine Reference Position are synonymous.
Absolute position is established by a homing procedure that is initiated by
successful execution of an MAH instruction. Once the homing procedure has
successfully established a machine reference, the Axis Homed bit is set in the
Motion Status attribute, indicating that actual position and command position
now have meaning regarding the associated machine.
It is good application programming-practice to qualify dynamic machine
operation by homing all axes in the machine before operating the machine.
Otherwise, absolute moves to a specific position cannot have any relationship
to the position of the axis on the actual machine.
APR Terminology
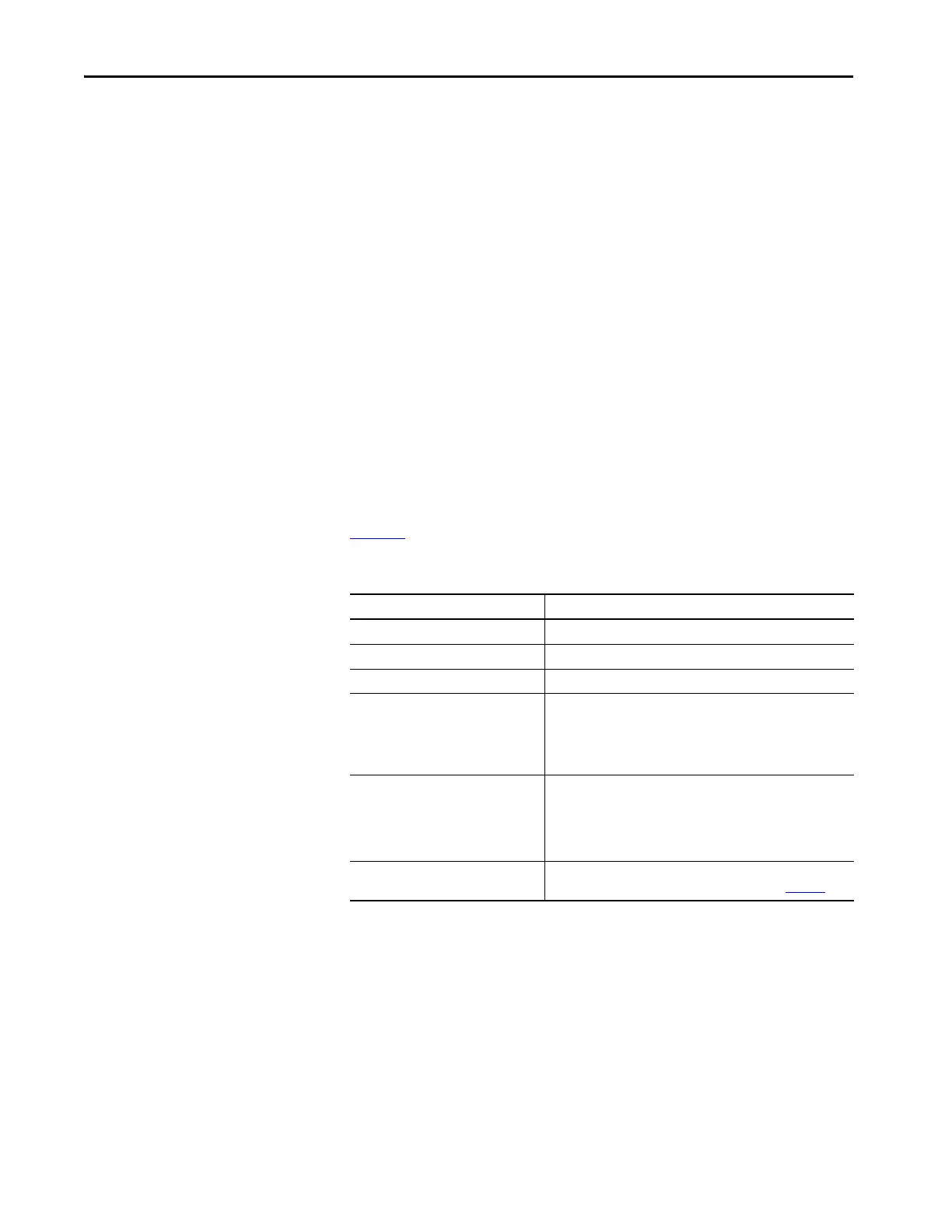
Table 58 describes terminology that is related to the APR feature.
Position Recovery Considerations for Logix5000 Controllers
There are differences in the way the ControlLogix® 5560, GuardLogix® 5560,
and the ControlLogix 5570 controllers recover machine position:
• The ControlLogix 5560 and GuardLogix 5560 controllers have a
battery and use a memory card to save information.
• The ControlLogix 5570 controller has a 1756-ESMxxx module and
uses a memory card to save information.
Table 58 - APR Terminology Descriptions
Term Description
Absolute Feedback Position Position value that is read from an absolute feedback device.
Incremental Feedback Position Position value that is read from an incremental feedback device.
Feedback Position Value that is read from a feedback device, absolute, or incremental.
Absolute Position
Absolute Machine Reference Position
Machine Reference Position
Position registers in the Logix 5000™ controllers after the following
instructions have been executed on a machine with an absolute or an
incremental feedback device:
• MAH, machine home
• MRP, machine redefine position
A machine home/reference Establishes a Machine Reference Offset as follows:
HomeOffset =
ConfiguredHomePosition - AbsoluteFeedbackPosition
AbsoluteMachineReferencePosition = AbsoluteFeedback Position
+ HomeOffset
Absolute Position Recovery (APR) Recovers the Absolute Machine Reference Position by maintaining the
Home Offset through various scenarios as described on page 263.

 Loading...
Loading...











