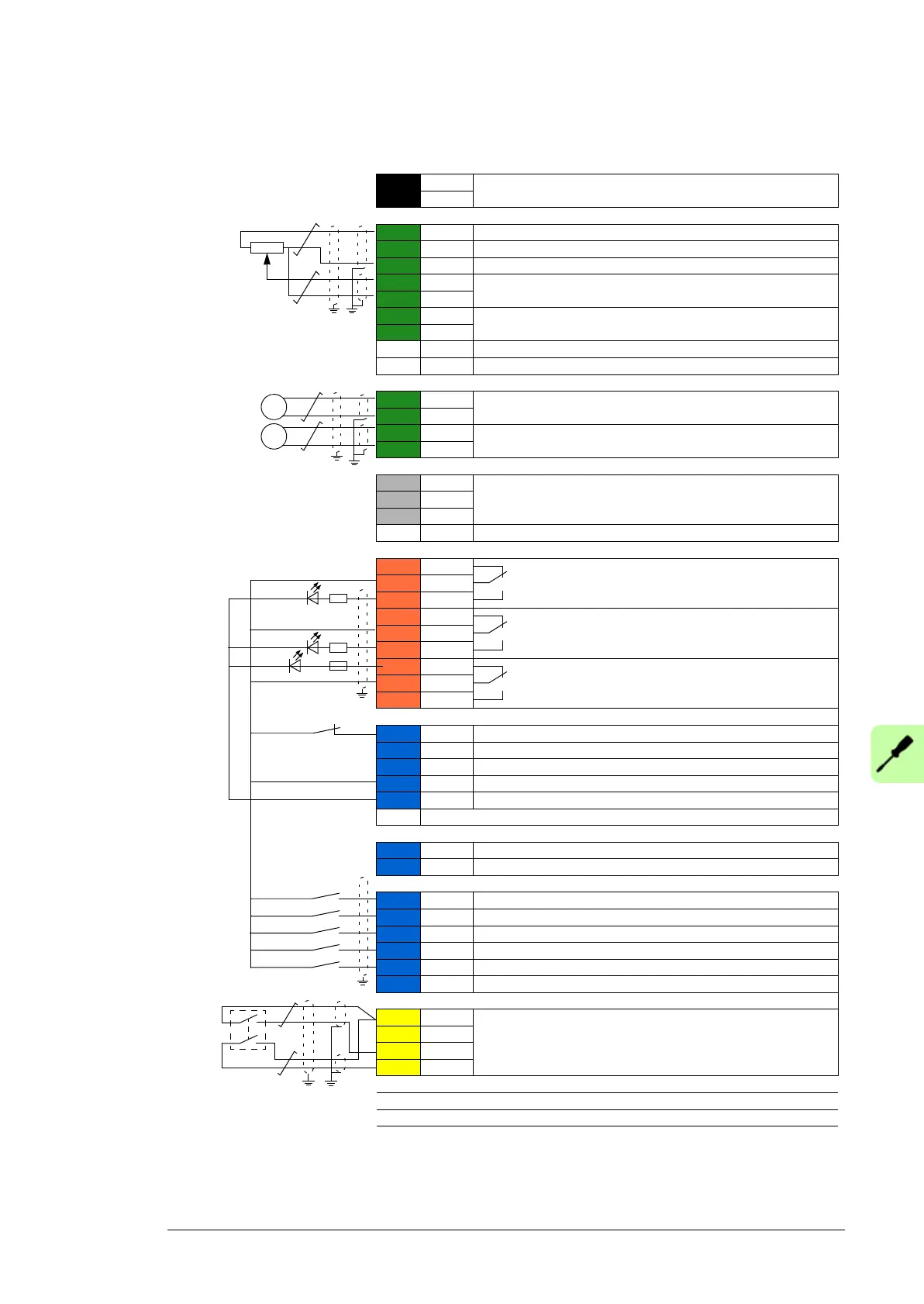
XPOW External power input
1 +24VI
24 V DC, 2 A
2 GND
XAI
Reference voltage and analog inputs
1 +VREF 10 V DC, R
L
1…10 kohm
2 -VREF -10 V DC, R
L
1…10 kohm
3 AGND Ground
4 AI1+
Speed reference 0(2)…10 V, R
in
> 200 kohm
1)
5 AI1-
6 AI2+
By default not in use. 0(4)…20 mA, R
in
= 100 ohm
2)
7 AI2-
J1 J1 AI1 current/voltage selection jumper
J2 J2 AI2 current/voltage selection jumper
XAO Analog outputs
1 AO1
Motor speed rpm 0…20 mA, R
L
< 500 ohm
2 AGND
3 AO2
Motor current 0…20 mA, R
L
< 500 ohm
4 AGND
XD2D
Drive-to-drive link
1 B
Drive-to-drive link
2 A
3 BGND
J3 J3 Drive-to-drive link termination switch
XRO1, XRO2, XRO3 Relay outputs
11 NC
Ready
250 V AC / 30 V DC
2 A
12 COM
13 NO
21 NC
Running
250 V AC / 30 V DC
2 A
22 COM
23 NO
31 NC
Faulted(-1)
250 V AC / 30 V DC
2 A
32 COM
33 NO
XD24 Digital interlock
1 DIIL Run enable
2 +24VD +24 V DC 200 mA
3)
3 DICOM Digital input ground
4 +24VD +24 V DC 200 mA
3)
5
DIOGN
Digital input/output ground
J6 Ground selection switch
XDIO
Digital input/outputs
1 DIO1 Output: Ready
2 DIO2 Output: Running
XDI
Digital inputs
1 DI1 Stop (0) / Start (1)
2 DI2 Forward (0) / Reverse (1)
3 DI3 Reset
4 DI4 Acceleration & deceleration select
4)
5 DI5 Constant speed 1 (1 = On)
5)
6 DI6 By default not in use.
XSTO
Safe torque off
1 OUT1
Safe torque off. Both circuits must be closed for the drive to start.
2 SGND
3 IN1
4 IN2
X12 Safety functions module connection
X13 Control panel connection
X205 Memory unit connection
Accepted control unit terminal wire sizes: 0.5 … 2.5 mm
2
(24…12 AWG). Tightening torques: 0.5 N·m (5 lbf·in) for both
stranded and solid wiring. For terminal X504 (option +L504), see page 53. See the page 124 for the notes.
Fault

 Loading...
Loading...






