—————— Instruction manual ——————
169
Friction Frictionvalue(orLosscompensation)inN*m(1N*m=0.738lb*ft).
Friction Nw
NewFrictionvalue(orLosscompensation)inN*midentiedduringthespeedselftuneprocedure.
Speed P Proportionalcoefcientofthespeedregulatorinpercentage.
Speed P Nw Newvalueof Proportionalcoefcientofthespeedregulatorinpercentagecomputed
duringthespeedselftuneprocedure.
Speed I Integralcoefcientofthespeedregulatorinpercentage.
Speed I Nw Newvalueof Integralcoefcientofthespeedregulatorinpercentagecomputedduring
thespeedselftuneprocedure.
Take val Acquiretheparametersafterthespeedselftuneprocedure(overwritecurrentvalues).
Note! Thisisnotapermanentsave.Goto“Saveparameters”command.
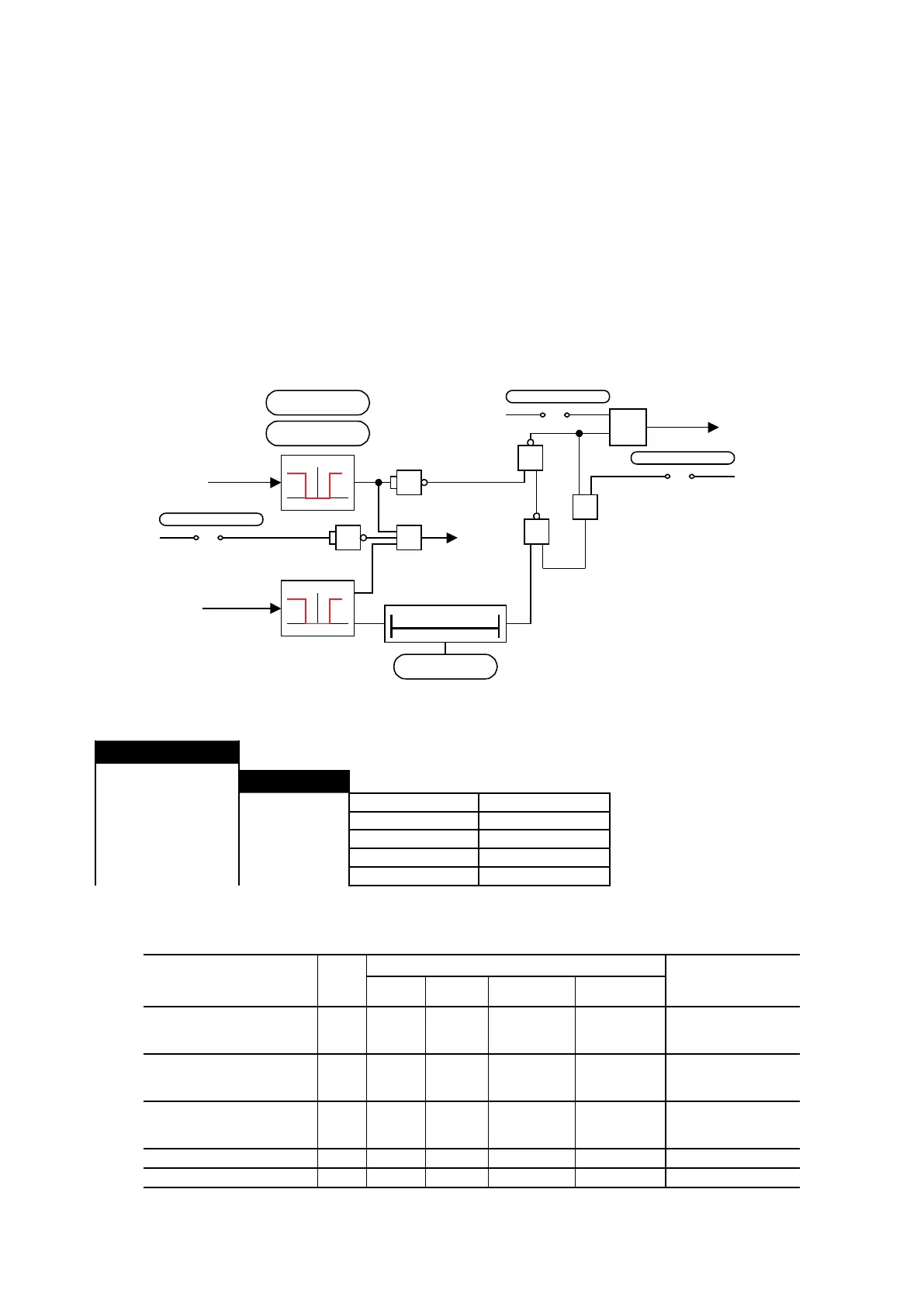
6.7.2 Spd zero logic
0
t
&
&
&
>=
>
=
&
>=
Lock speed I
Lock speed I
Ref 0 level
Speed zero
Speed
Ramp ref/Speed ref
T
T
T
Spd=0 P gain
10 %
Ref 0 level
10 rpm
Speed zero delay
100 ms
Enable spd=0 I
Enable spd=0 P
Enable spd=0 R
Figure 6.7.2.1: Speed zero logic
SPEED REGULAT
Spd zero logic
[123] Enablespd=0I
[124] Enablespd=0R
[125] Enablespd=0P
[126] Spd=0Pgain[%]
[106] Ref0level[FF]
Thespeedzerologicdeterminesthebehaviorofthedrivewhenthemotorshaftisatastop.
Parameter description No.
Value
Standard
Conguration
min max
Factory
American
Factory
Standard
Enable spd=0 I
Enabled(1)
Disabled(0)
123 0 1 Disabled Disabled
-
Enable spd=0 R
Enabled(1)
Disabled(0)
124 0 1 Disabled Disabled
-
Enable spd=0 P
Enabled(1)
Disabled(0)
125 0 1 Disabled Disabled
-
Spd=0 P gain [%]
126 0.00 100.00 10.00 10.00
-
Ref 0 level [FF]
106 1 32767 10 10
-
 Loading...
Loading...



