—————— TPD32-EV ——————
318
6.16.3.12 Application note
Dynamic modication of the integral gain of the PI block
Instandarddancerapplications,wherethereisnotabuildupofmaterial,thePIgainsaresettoaconstantvalue.
Wheredancersareusedinconjuctionwithmaterialwinding,thegainsarecompromisebetweenlowgainset-
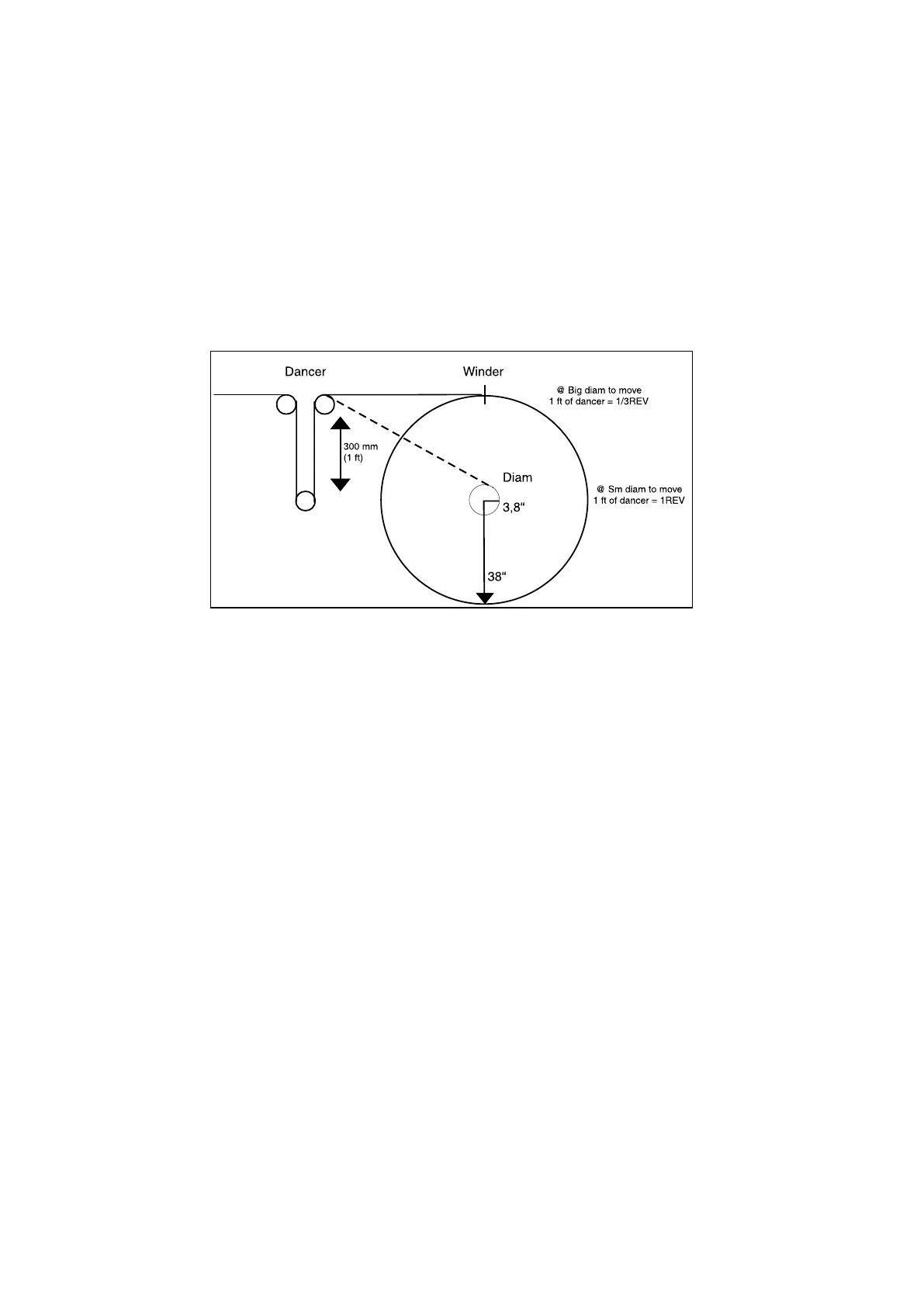
tingatlargediameter,andhighgainsettingsatasmalldiameter.Usingthedrawingasanexample,itcanbe
seenthatwithalargediameterroll,theamountofmaterialtomovethedancerrequiresonlyafractionofaturn.
Atasmalldiameter,oremptyroll,thecenteroftherollmustrotateawholeturntomovethesameamountof
material.SincethePIregulatorisusedtoprovidethecorrectioninrpmtomaintainthedancerposition,having
thegainsetbyasinglevalueisinadequatewhenusedwithawinder.
Figure 6.16.3.15: Example with small and large diameter
BetterdancercontrolisrealizedifthegainofthePIismodieddynamicallybasedondiameter.Thiscanbe
accomplishedusingLINKSfunction.
Incaseofhigherratiodiameters,PI I gain PIDcouldbedynamicallychangedaccordingtotheactualdiameter.
Atthemomentthisfunctionalityhasnotbeenimplementedasspecicfunction.
Forexampletocontrolawinderhavingadiametersratioof1/10.
ThefunctionLINK1isusedtogetaconnectionbetweenthediameterandthevalueoftheintegralcomponent
ofthePIblock.
Theintegralcomponentoftheregulatormusthaveabehaviourinverselyproportionaltothediameter.
ThevalueoftheparameterPI output PIDalreadyfollowsthisbehaviour.Infact,itchangesaccordingtothe
relationΦ
0
/Φ
act
.
Where:Φ
0
=minimumrolldiameter
Φ
act
=actualrolldiameter
TheoperationtocarryoutthroughtheLINKparameteris:
PI output PIDxKI=PI I gain PID
WhereKIcorrespondstothevalueoftheintegralcomponentonminimumdiametercondition.
Forexample,ifatmindiameter,themaximumspeedwithsteadydancerinelectriczeropositionwithPI I gain
PID=40%.
 Loading...
Loading...



