—————— TPD32-EV ——————
298
Diameter calc Enablingoftheinitialfunctionofdiametercalculation.
ThecalculationwillbeenabledbysettingDiameter calc =Enable.
IfDiameter calc hasbeenprogrammedonadigitalinput,thismustbebroughttoa
highlogiclevel.
Positioning spd Motorspeedatwhichthedancerisatitscentralworkingposition,duringthecalculation
phaseoftheinitialdiameter.
Max deviation ValueexpressedincountofD/Awhichcorrespondstothemaximumshiftallowedby
thedancer.Thisvaluewillbeassociatedwiththestartingmeasurementofthedancer
movementduringthecalculationoftheinitialdiameter.
Duringthepreliminaryphaseofthecommissioning,itisnecessarytocarryouttheself-calibrationoftheanalog
inputs,soatthefullrangepositionofthedancertheywillcorrespond,whateverwasthevalueoftheanaloginput,
at10000counts.TheparameterMax deviation,inordertoguaranteeaprecisecalculationofthemovement,
mustbesetatavalueslightlylower.(standardMax deviation =8000).
Gear box ratio Ratioreductionbetweenthemotorandtheroll(<=1).
Dancer constant Itexpressesthemeasureinmm,thetotalbunchingofmaterialinthedancer.
Dancer constant=(
∆
Lx x
M
Gear box ratio
Dancer constant=(
∆
Lx x
Dancer
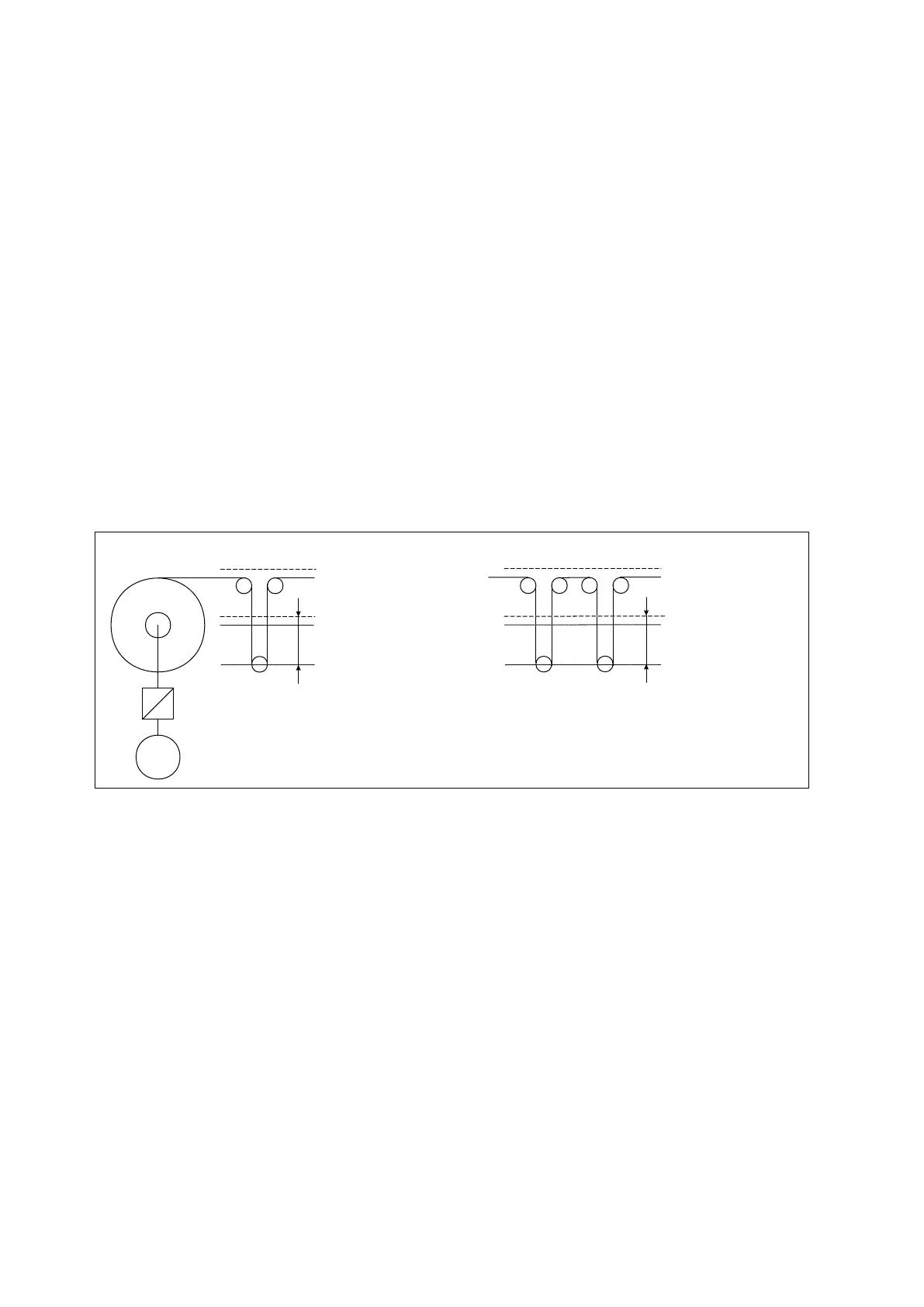
Winder/Unwinder
∆
L
electrical 0
Central position
of working
Dancer
Upper limit
switch=+10000 count
Lower limit
switch=-10000 count
∆
L
electrical 0
Central position
of working
Upper limit
switch=+10000 count
Lower limit
switch=-10000 count
Two pitches dancerOne pitch dancer
Figure 6.16.3.7: Diameter calculation
MeasurementofDancer constant:
Withdancerinlowerfullrangeposition,performtheself-calibrationoftheanaloginputprogrammedasPID
feed-back.
SetthekeypadofthedriveontheparameterPID feed-back.
Measureandmultiplyby2,thedistanceinmmbetweenthelowermechanicalfullrangeandthepositionofthe
dancerthat,ontheparameterPID feed-back, willdisplay0(positionofelectrical0).
Multiplytheabovecalculatedvalueby2ifthedancerhasonlyonepitch,by4ifthedancerhastwopitchesand
soon,asperthegureabove.
Minimum diameter Min.valueofcorediameterexpressedincm.
 Loading...
Loading...



