Actual signals and parameters 191
Group 20: Limits
This group defines minimum and maximum limits to follow in driving the motor –
speed, frequency, current, torque, etc.
Group 20: Limits
Code Description Range Resolution Default S
2003
MAX CURRENT
0.0 … 1.1 * I
2N
0.1 A 1.1 * I
2N
Defines the maximum output current (A) supplied by the drive to the motor.
2006
UNDERVOLT CTRL
0…2 1 1
Sets the DC undervoltage controller on or off. When on:
• If the DC bus voltage drops due to loss of input power, the undervoltage controller
decreases the motor speed in order to keep the DC bus voltage above the lower
limit.
• When the motor speed decreases, the inertia of the load causes regeneration back
into the drive, keeping the DC bus charged, and preventing an undervoltage trip.
• The DC undervoltage controller increases power loss ride-through on systems with
a high inertia, such as a centrifuge or a fan.
0 = DISABLE – Disables controller.
1 = ENABLE (TIME) – Enables controller with 500 ms time limit for operation.
2 = ENABLE – Enables controlled without maximum time limit for operation.
2007
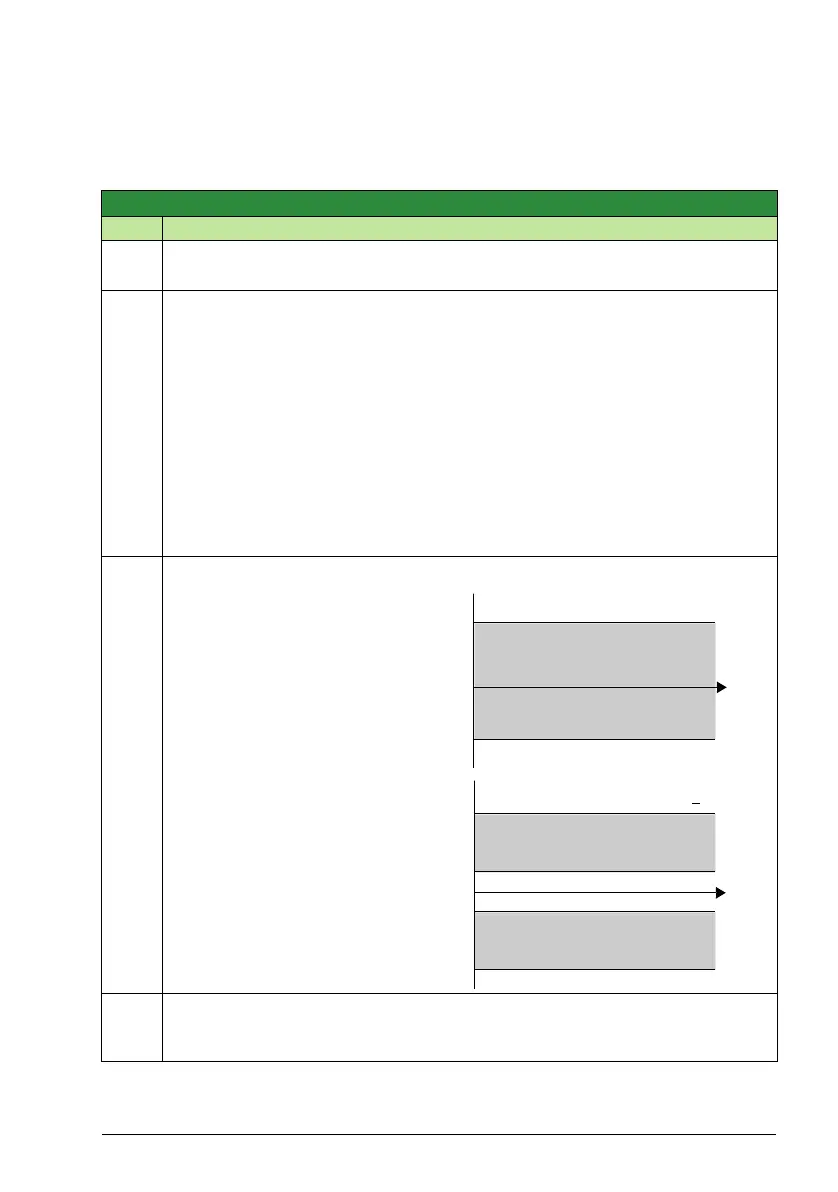
MINIMUM FREQ
-500.0 … 500.0 Hz 0.1 Hz 0.0 Hz
Defines the minimum limit for
the drive output frequency.
• A positive or zero minimum
speed frequency defines two
ranges, one positive and one
negative.
• A negative minimum speed
frequency defines one speed
range. See figure.
Note: Keep MINIMUM
FREQ≤ MAXIMUM FREQ.
2008
MAXIMUM FREQ
0.0 … 500.0 Hz 0.1 Hz 60.0 Hz
(US)
Defines the maximum limit for the drive output frequency.
Freq
Frequency range allowed
Frequency range allowed
Frequency range allowed
Time
Freq
Time
0
0
2008
2007
2008
2007
-(2007)
-(2008)
2007 value is < 0
2007 value is >
0

 Loading...
Loading...








