2.12.5 Programmable rotation (ROT, AROT, RPL)
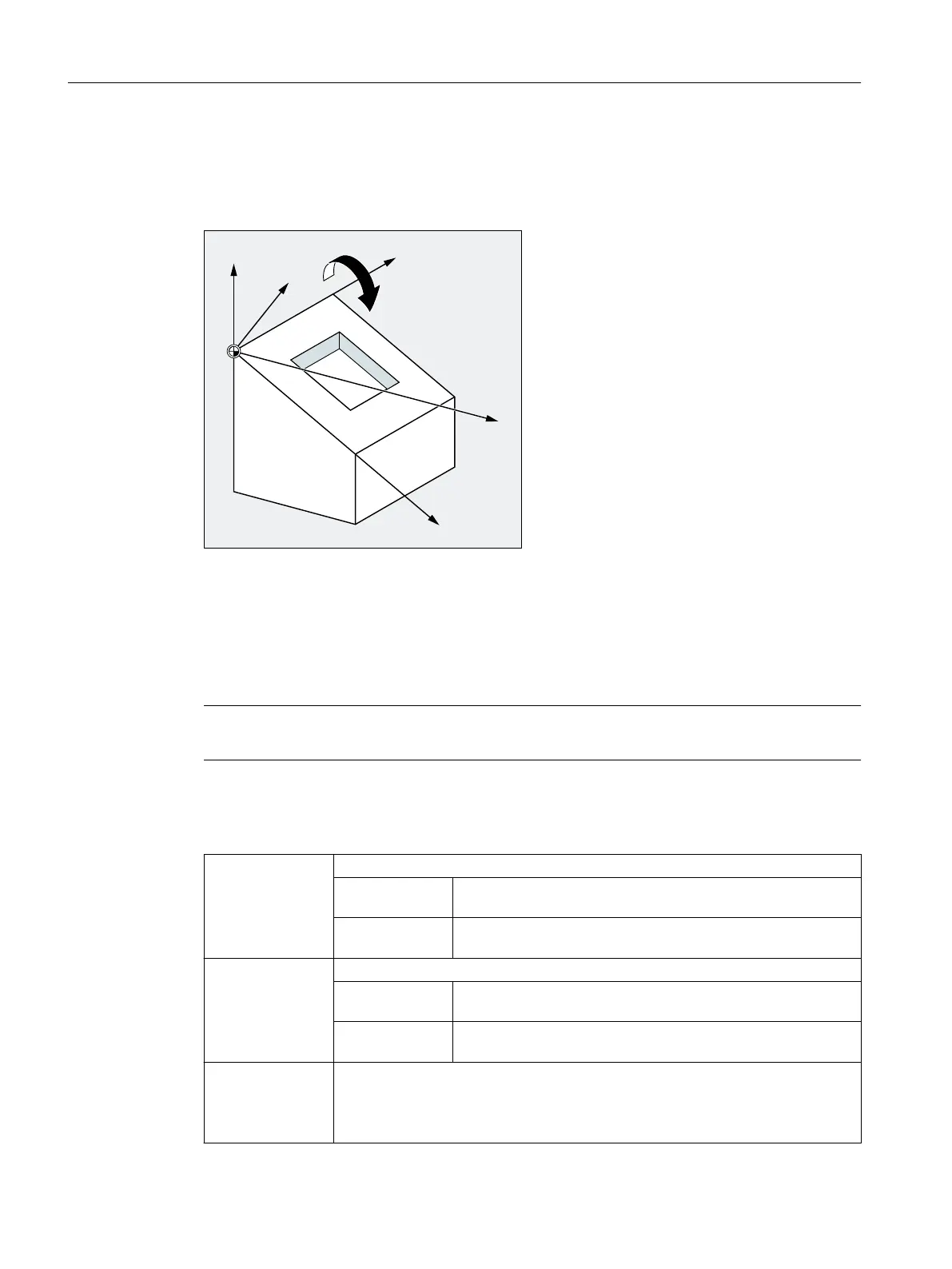
The workpiece coordinate system can be rotated in space with the ROT/AROT statements. The
statements refer exclusively to the programmable frame $P_PFRAME.
Syntax
ROT <1st GeoAx><angle> <2nd GeoAx><angle> <3rd GeoAx><angle>
ROT RPL=<angle>
AROT <1st GeoAx><angle> <2nd GeoAx><angle> <3rd GeoAx><angle>
AROT RPL=<angle>
Note
The rotations of the workpiece coordinate system are performed via Euler angles.
Meaning
ROT: Absolute rotation
Reference
frame:
Programmable frame $P_PFRAME
Reference point: Zero point of the current workpiece coordinate system set
with G54 ... G57, G505 ... G599
AROT: Additive rotation
Reference
frame:
Programmable frame $P_PFRAME
Reference point: Zero point of the current workpiece coordinate system set
with G54 ... G57, G505 ... G599
<nth GeoAx>: Identifier of the nth geometry axis around which rotation is to be performed with the
specified angle.
The value 0° is implicitly set as angle of rotation for a geometry axis that has not
been programmed.
Fundamentals
2.12 Coordinate transformations (frames)
NC programming
316 Programming Manual, 12/2019, 6FC5398-2EP40-0BA0
 Loading...
Loading...














