Example
The rotary axis position shown in the following diagram can be approached in the negative or
positive direction. The angular position is programmed under address A1. The traversing
direction is only absolutely clear when TU is specified.
7DUJHWSRVLWLRQ
6WDUWLQJSRVLWLRQ
1HJDWLYHGLUHFWLRQ
$ r78ELW
3RVLWLYHGLUHFWLRQ
$ r78ELW
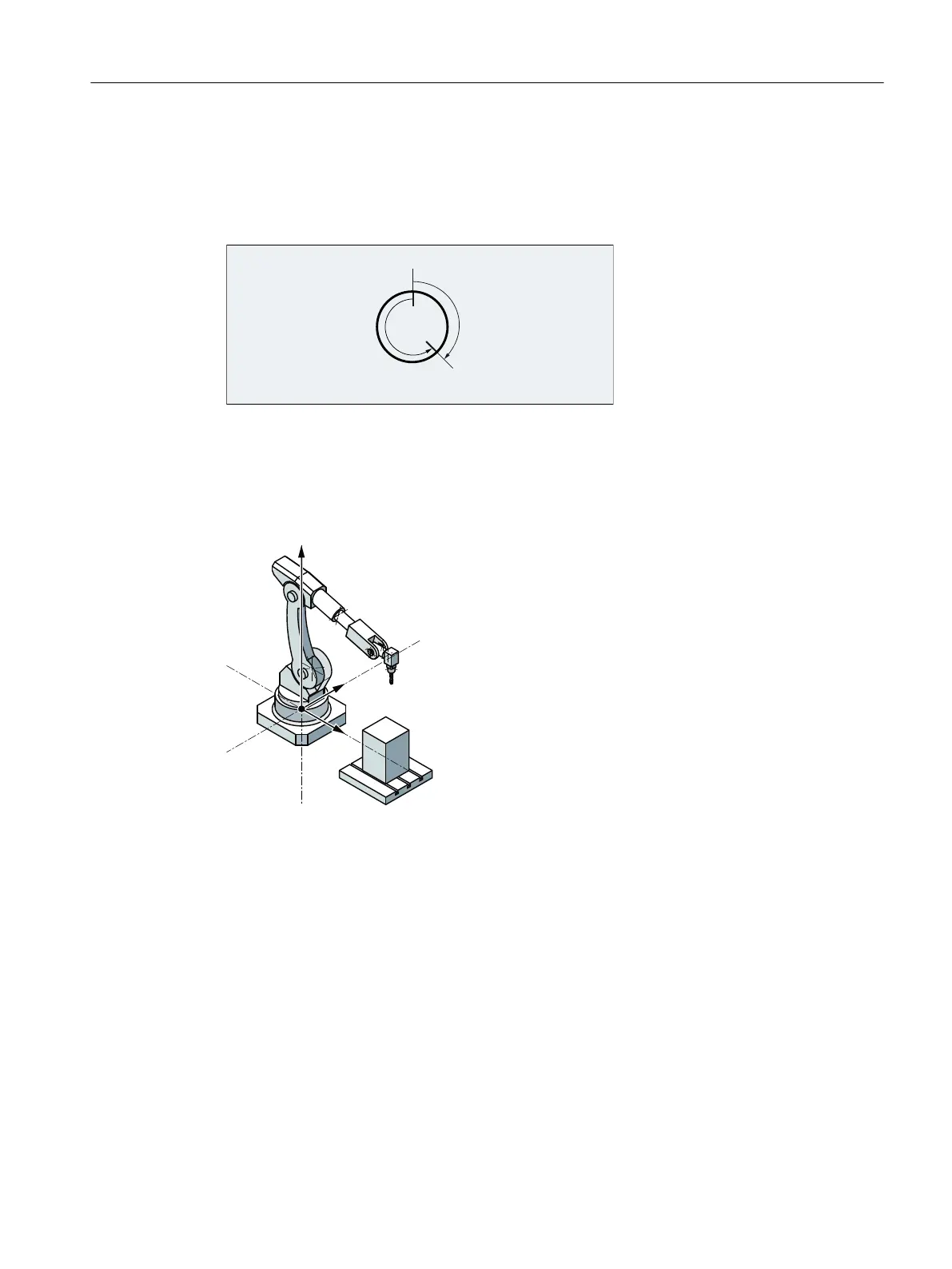
3.9.11.4 Example 1: PTP travel of a 6-axis robot with ROBX transformation
In the following application example, Cartesian PTP travel and the associated NC commands
are shown in the form of an example.
Figure 3-6 6-axis articulated robot with milling spindle
N1 G90
N2 T=“T8MILLD20“ D1 M6
N3 TRAORI
;$P_UIFR[1]=CTRANS(X,1500,Y,0,Z,400):CROT(X,0,Y,0,Z,-90)
N4 G54
N5 M3 S20000
N6 ORIWKS
N7 ORIVIRT1
N8 CYCLE832(0.01,_FINISH,1)
;HOME
N9 TRAFOOF
N10 G0 RA1=0.0000 RA2=-90.0000 RA3=90.0000 A=0.0000 B=90.0000 C=0.0000
N11 TRAORI
Work preparation
3.9 Transformations
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 715
 Loading...
Loading...














