2.15.2 From travel command to machine movement
The relationship between the programmed axis movements (travel commands) and the
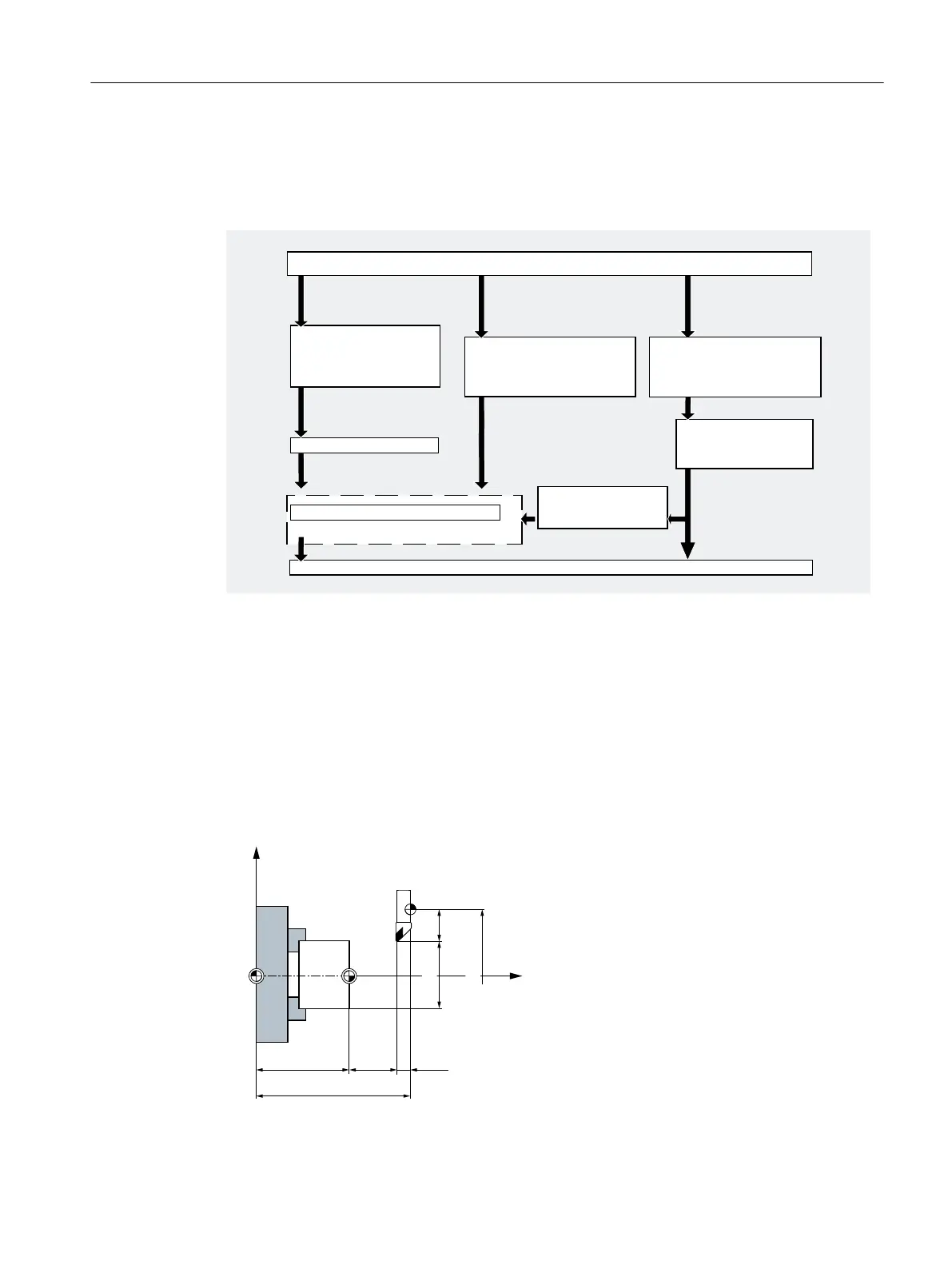
resulting machine movements is illustrated in the following figure:
$[LVPRYHPHQWSURJUDPPHGLQWKHZRUNSLHFHFRRUGLQDWHV\VWHP
'HVFULSWLRQRIWKH
ZRUNSLHFHJHRPHWU\YLDJHRPHWU\
D[HVHJ;<=
&RQWRXULQWKH&DUWHVLDQ
FRRUGLQDWHV\VWHP
RIWKHFKDQQHO%&6
7RROUDGLXVFRPSHQVDWLRQ
0RYHPHQWRIWKH
WRRO]HUR
LQWKH%&6
7RROOHQJWKFRPSHQVDWLRQ
.LQHPDWLFWUDQVIRUPDWLRQLIDFWLYH
0RYHPHQWRIWKHPDFKLQHD[HVRIFKDQQHODEF
5RWDU\D[HVIRUD[LV
WUDQVIRUPDWLRQ
5HPDLQLQJWUDYHUVLQJ
FRPPDQGVYLDVRFDOOHG
VSHFLDOD[HVHJ&89
'HVFULSWLRQRIWKHWRRO
RULHQWDWLRQYLDRULHQWDWLRQ
YHFWRU(XOHUDQJOH
)UDPHFDOFXODWLRQ
2IIVHW75$16
5RWDWLRQ527
6FDOLQJ6&$/(
)UDPHFDOFXODWLRQ
2IIVHW
6FDOLQJ
2.15.3 Path calculation
The path calculation determines the distance to be traversed in a block, taking into account all
offsets and compensations.
In general:
Path =
setpoint - actual value + zero offset (ZO) + tool offset (TO)
$EVROXWHSRVLWLRQ
6HW
SRLQW
6HWSRLQW
$EVROXWHSRVLWLRQ
;
=0:
19
:.
:.
7
Fundamentals
2.15 Other information
NC programming
Programming Manual, 12/2019, 6FC5398-2EP40-0BA0 379
 Loading...
Loading...














