In particular for the programmable frame $P_PFRAME:
● TRANS <K_1> <value>
● TRANS <K_1> <value> <K_2> <value>
● TRANS <K_1> <value> <K_2> <value> <K_3> <value>
Meaning
<Frame>: Frame, e.g. settable frame of the data storage $P_UIFR[<n>]
CFINE: Fine offset, additive offset.
CTRANS: Coarse offset, absolute offset.
TRANS: Only programmable frame: Coarse offset, absolute offset.
<K_n>: Coordinate axes X, Y, Z
<value>: Offset value
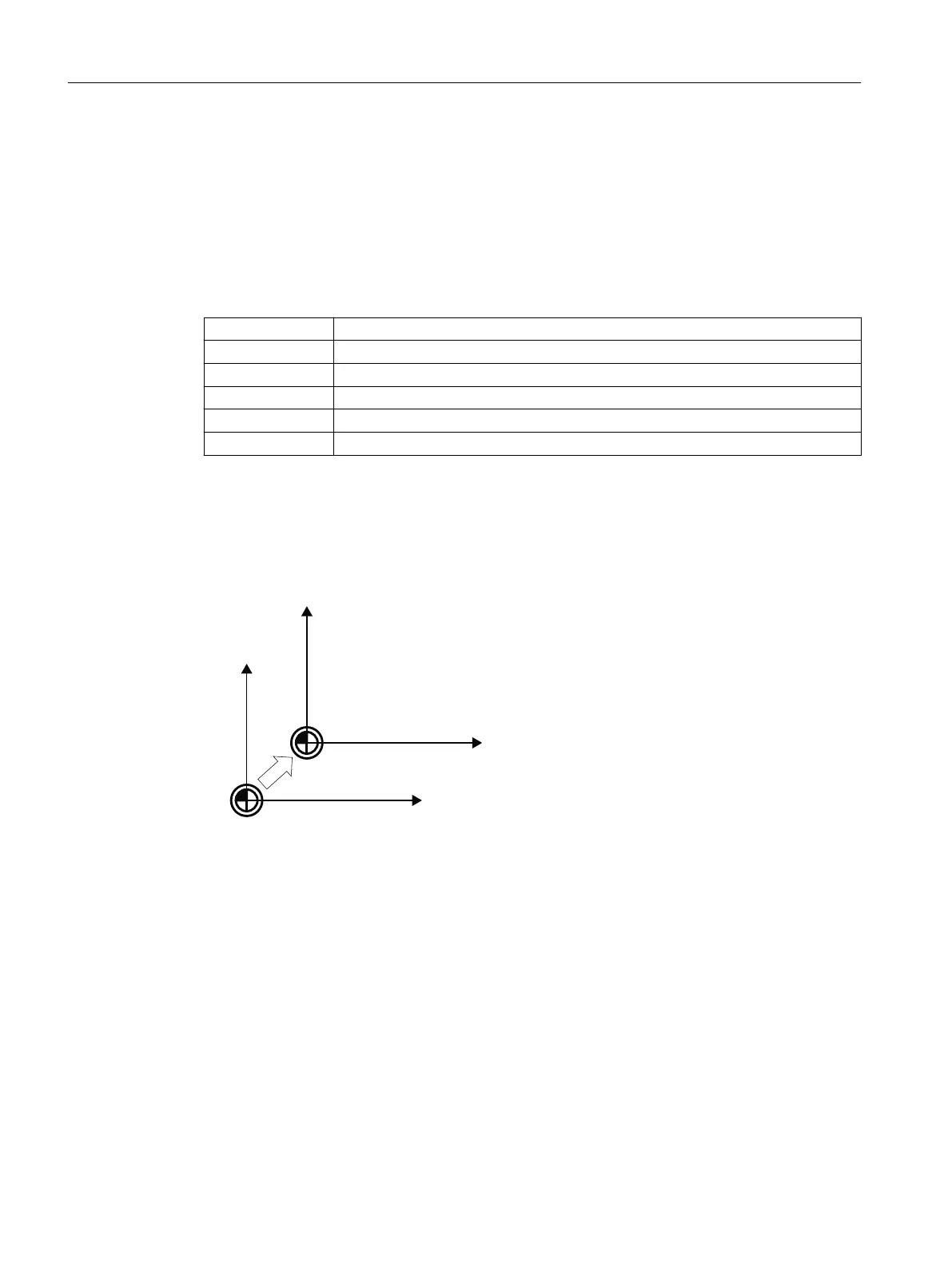
3.8.4 External zero offset ($AA_ETRANS)
The external zero offset is a linear offset between the base coordinate system (BCS) and the
basic origin system (BOS).
]
%.6
[
%.6
[
%16
]
%16
$$B(75$163B(;7)5$0(
The external zero offset with $AA_ETRANS acts in two ways depending on the machine data
parameterization:
1. After activation by the NC/PLC interface signal, the system variable $AA_ETRANS acts
directly as offset value
2. After activation by the NC/PLC interface signal, the value of the system variable
$AA_ETRANS is transferred to the active system frames $P:EXTFRAME and the data
storage frame $P_EXTFR. The active total frame $P_ACTFRAME is then recalculated.
Machine data
In conjunction with the system variable $AA_ETRANS, a differentiation is made between two
procedures selected with the following machine data:
Work preparation
3.8 Coordinate transformations (frames)
NC programming
640 Programming Manual, 12/2019, 6FC5398-2EP40-0BA0
 Loading...
Loading...














