Parameter
structure
Keypad and
display
Parameter x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
18 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
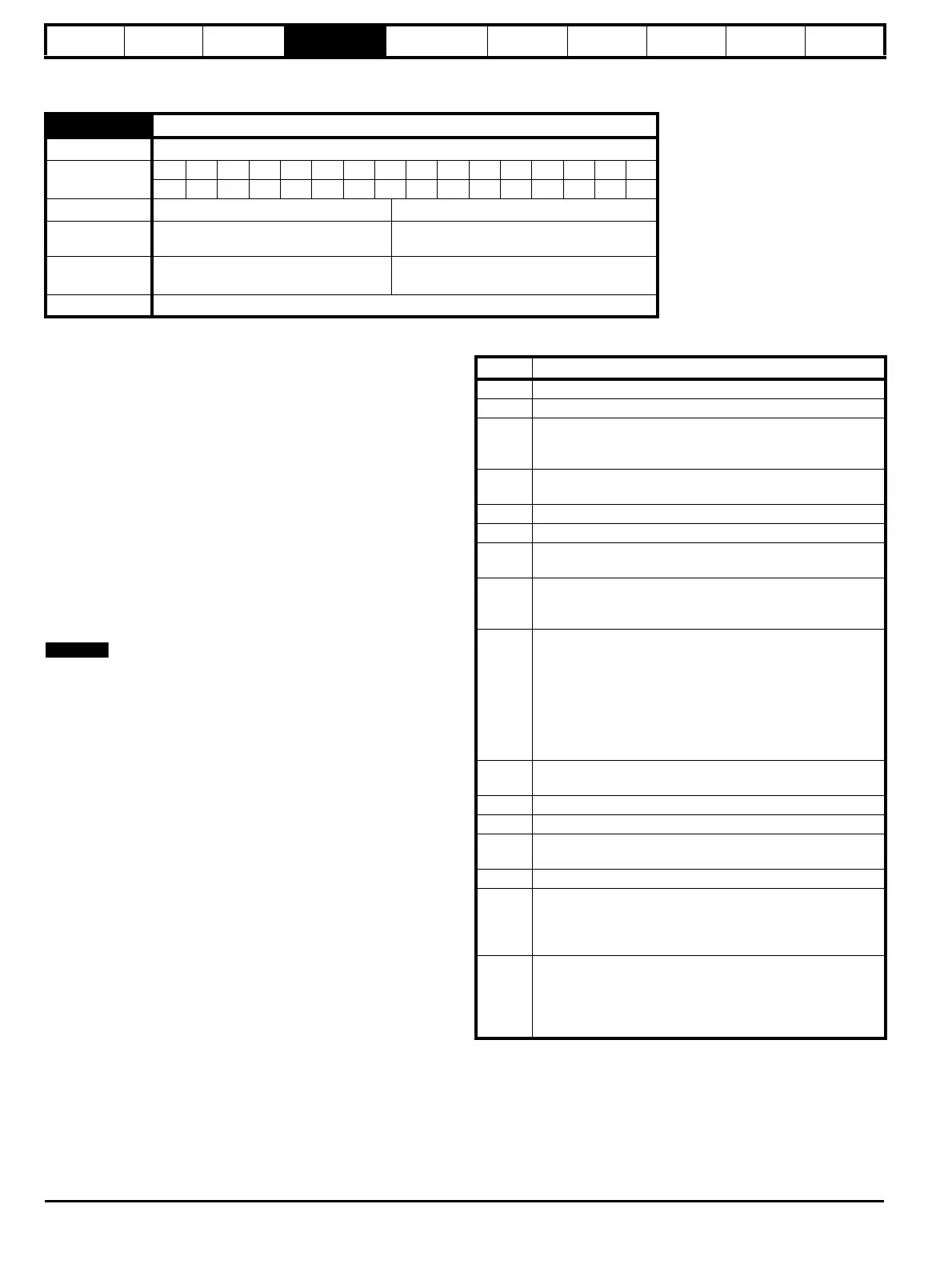
4 Parameter description format
In the following sections descriptions are given for the advanced parameter set. With each parameter the following information block is given.
The top row gives the menu parameter number and name. The other
rows provide the following information.
Drive modes
The drive modes are the modes in which this parameter is accessible. If
the parameter is not present the parameter is skipped when accessing
from the keypad. The following types are possible.
Open-loop - The control strategy is V/F mode with fixed boost or open-
loop vector control.
Closed-loop vector - The control strategy is rotor flux oriented vector
control with closed-loop current operation for induction motors. The drive
can be operated with or without position feedback.
Servo - The control strategy is rotor flux oriented vector control with
closed-loop current operation for permanent magnet synchronous
motors. The drive must be operated with position feedback.
Regen - The drive operates as a PWM rectifier.
Coding
This guide will show all bit parameters (with the Bit coding), as having a
parameter range of "0 to 1", and a default value of either "0" or "1". This
reflects the value seen through serial communications. The bit
parameters will be displayed on the SM-Keypad or SM-Keypad Plus (if
used) as being "OFF" or "On" ("OFF"= 0, "On" = 1).
The coding defines the attributes of the parameter as follows:
5.11 Number of motor poles
Drive modes
Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1111
Range Open-loop, Closed-loop vector, Servo 0 to 60 (Auto to 120 POLE)
Default
Open-loop, Closed-loop vector
Servo
0 (Auto)
3 (6 POLE)
Second motor
parameter
Open-loop, Closed-loop vector, Servo Pr 21.11
Update rate
Background read
Coding Attribute
Bit 1 bit parameter
SP Spare: not used
FI
Filtered: some parameters which can have rapidly changing
values are filtered when displayed on the drive keypad for
easy viewing.
DE
Destination: indicates that this parameter can be a
destination parameter.
Txt Text: the parameter uses text strings instead of numbers.
VM Variable maximum: the maximum of this parameter can vary.
DP
Decimal place: indicates the number of decimal places used
by this parameter.
ND
No default: when defaults are loaded (except when the drive
is manufactured or on EEPROM failure) this parameter is not
modified.
RA
Rating dependent: this parameter is likely to have different
values and ranges with drives of different voltage and current
ratings. Parameters with this attribute will not be transferred
to the destination drive by SMARTCARDs when the rating of
the destination drive is different from the source drive and the
file is a parameter file. However, with software V01.09.00 and
later the value will be transferred if only the current rating is
different and the file is a differences from default type file.
NC
Not copied: not transferred to or from SMARTCARDs during
copying.
NV Not visible: not visible on the keypad.
PT Protected: cannot be used as a destination.
US
User save: saved in drive EEPROM when the user initiates a
parameter save.
RW Read/write: can be written by the user.
BU
Bit default one/unsigned: Bit parameters with this flag set to
one have a default of one (all other bit parameters have a
default of zero. Non-bit parameters are unipolar if this flag is
one.
PS
Power-down save: parameter automatically saved in drive
EEPROM when the under volts (UV) trip occurs.
With software version V01.08.00 and later, power-down
save parameters are also saved in the drive when the user
initiates a parameter save.