Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menu 1
Unidrive SP Advanced User Guide 37
Issue Number: 10 www.controltechniques.com
The drive can be controlled from the keypad if Pr 1.14 is set to 4. The Stop and Run keys automatically become active (the Reverse key may be
optionally enabled with Pr 6.13). The frequency/speed reference is defined by Pr 1.17. This is a read only parameter that can only be adjusted in
status mode by pressing the Up or Down keys. If keypad control mode is selected, then pressing the Up or Down keys in status mode will cause the
drive to automatically display the keypad reference and adjust it in the relevant direction. This can be done whether the drive is disabled or running. If
the Up or Down keys are held the rate of change of keypad reference increases with time. The units used for to display the keypad reference for
different modes are given below.
See also Pr 1.51 on page 41 (Power-up keypad control mode reference).
See below.
Open loop
The frequency reference resolution is restricted to 0.1Hz from normal parameters, but the resolution can be improved by using the precision
reference. Pr 1.18 defines the coarse part of reference (either positive or negative) with a resolution of 0.1Hz and Pr 1.19 defines the fine part of the
reference (always positive) with a resolution of 0.001Hz. The final reference is given by Pr 1.18 + Pr 1.19. Therefore Pr 1.19 increases positive
references away from zero, and decreases negative references towards zero.
Closed loop
As with open-loop a higher resolution speed reference can be programmed by selecting these parameters. In this case the speed will have a
resolution of 0.001 rpm.
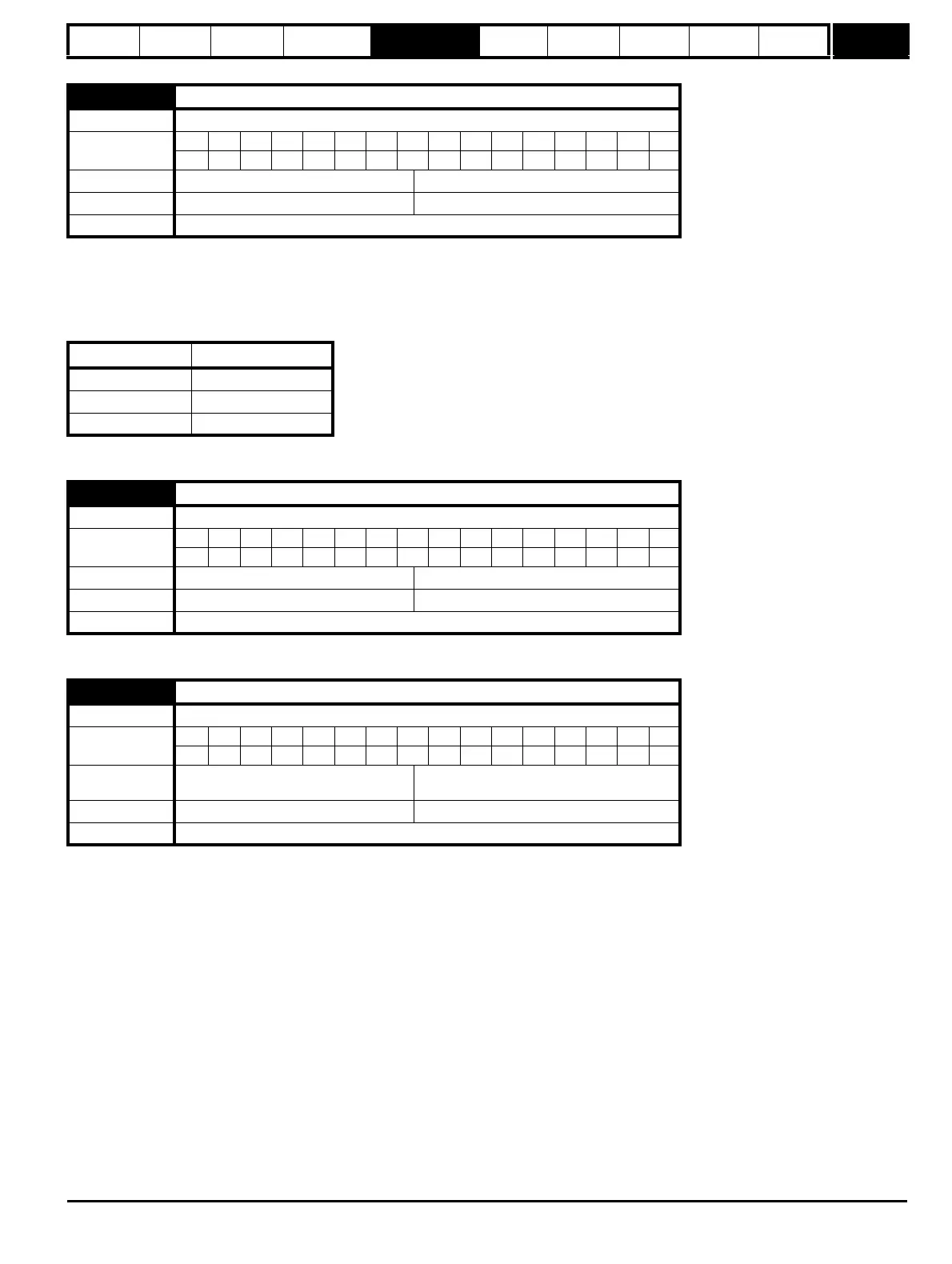
1.17 Keypad control mode reference
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11 1 1 1
Range Open-loop, Closed-loop vector, Servo ±SPEED_FREQ_MAX Hz/rpm
Default Open-loop, Closed-loop vector, Servo 0.0
Update rate 4ms read
Mode Unit
Open loop Hz
Closed loop rpm
Servo rpm
1.18 Precision reference coarse
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
11 11
Range Open-loop, Closed-loop vector, Servo ±SPEED_FREQ_MAX Hz/rpm
Default Open-loop, Closed-loop vector, Servo 0.0
Update rate Background read
1.19 Precision reference fine
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
3111
Range
Open-loop
Closed-loop vector, Servo
0.000 to 0.099 Hz
0.000 to 0.099 rpm
Default Open-loop, Closed-loop vector, Servo 0.000
Update rate Background read

 Loading...
Loading...








