Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
386 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
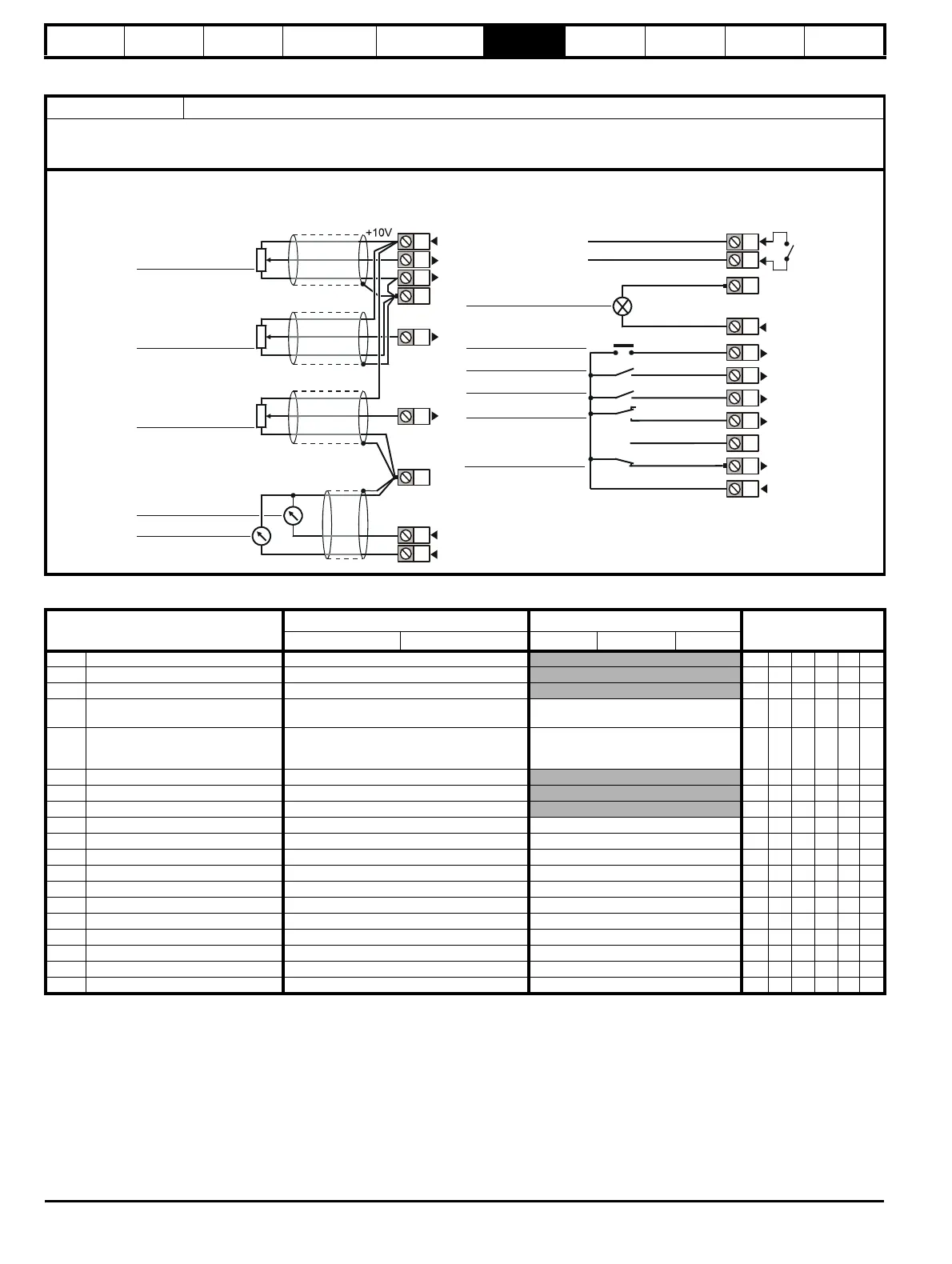
6.6 Macro 5 - PID control
Table 6-10 Macro 5 menu 0 programmable parameters
Macro 5 PID control
The PID control macro enables the drive's own internal PID controller to control the speed of the motor. Analog input 1 is configured for the main
speed reference, analog input 2 is the PID reference and analog input 3 is the PID feedback. A digital input selects between an analog speed
reference and the PID control.
Frequency/speed
reference 1 (0 ~ 10V)
PID feedback
TORQUE
0V common
PID reference
(0 ~ 10V)
RUN FORWARD
RUN REVERSE
PID ENABLE
0V
CONTROL
0V common
SPEED
4
5
6
3
7
11
9
10
8
23
24
25
26
DRIVE ENABLE
Signal
connector
Status relay
Drive
Parameter
Range(
Ú) Default(Ö)
Type
OL CL OL VT SV
0.11 Pre-ramp reference {1.03} ±SPEED_FREQ_MAX Hz/rpm
RO Bi NC PT
0.12 Post ramp reference {2.01} ±SPEED_FREQ_MAX Hz/rpm
RO Bi PT
0.13 Active current {4.02} ±DRIVE_CURRENT_MAX A
RO Bi FI NC PT
0.15 T7 analog input 2 mode {7.11}
0-20 (0), 20-0 (1), 4-20tr (2), 20-4tr (3),
4-20 (4), 20-4 (5), VOLt (6)
VOLt (6) RW Txt US
0.16 T8 analog input 3 mode {7.15}
0-20 (0), 20-0 (1), 4-20tr (2), 20-4tr (3),
4-20 (4), 20-4 (5), VOLt (6), th.SC (7),
th (8), th.diSP (9)
VOLt (6) RW Txt US
0.17 T5/6 analog input 1 level (7.01) ±100.00 %
RO Bi NC PT
0.18 T7 analog input 2 level (7.02) ±100.0 %
RO Bi NC PT
0.19 T8 analog input 3 level (7.03) ±100.0 %
RO Bi NC PT
0.20 PID P gain (14.10) 0.000 to 4.000 1.000 RW Uni US
0.21 PID I gain (14.11) 0.000 to 4.000 0.500 RW Uni US
0.22 PID D gain (14.12) 0.000 to 4.000 0.000 RW Uni US
0.23 PID upper limit (14.13) 0.00 to 100.00 % 100.00 RW Uni US
0.24 PID lower limit (14.14) ±100.0 % 100.00 RW Bi US
0.25 PID scaling (14.15) 0.000 to 4.000 1.000 RW Uni US
0.26 Preset reference 7 (1.27) ±SPEED_FREQ_MAX Hz/rpm 0.0 RW Bi US
0.27 Preset reference 8 (1.28) ±SPEED_FREQ_MAX Hz/rpm 0.0 RW Bi US
0.28 T7 analog input 2 scaling (7.12) 0 to 4.000 1.000 RW Uni US
0.29 T8 analog input 3 scaling (7.16) 0 to 4.000 1.000 RW Uni US
0.30 PID optional enable source (14.09) Pr 0.00 to 21.51 Pr 0.00 RW Uni PT US

 Loading...
Loading...








