Menu 3
All modes
Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
80 Unidrive SP Advanced User Guide
www.controltechniques.com Issue Number: 10
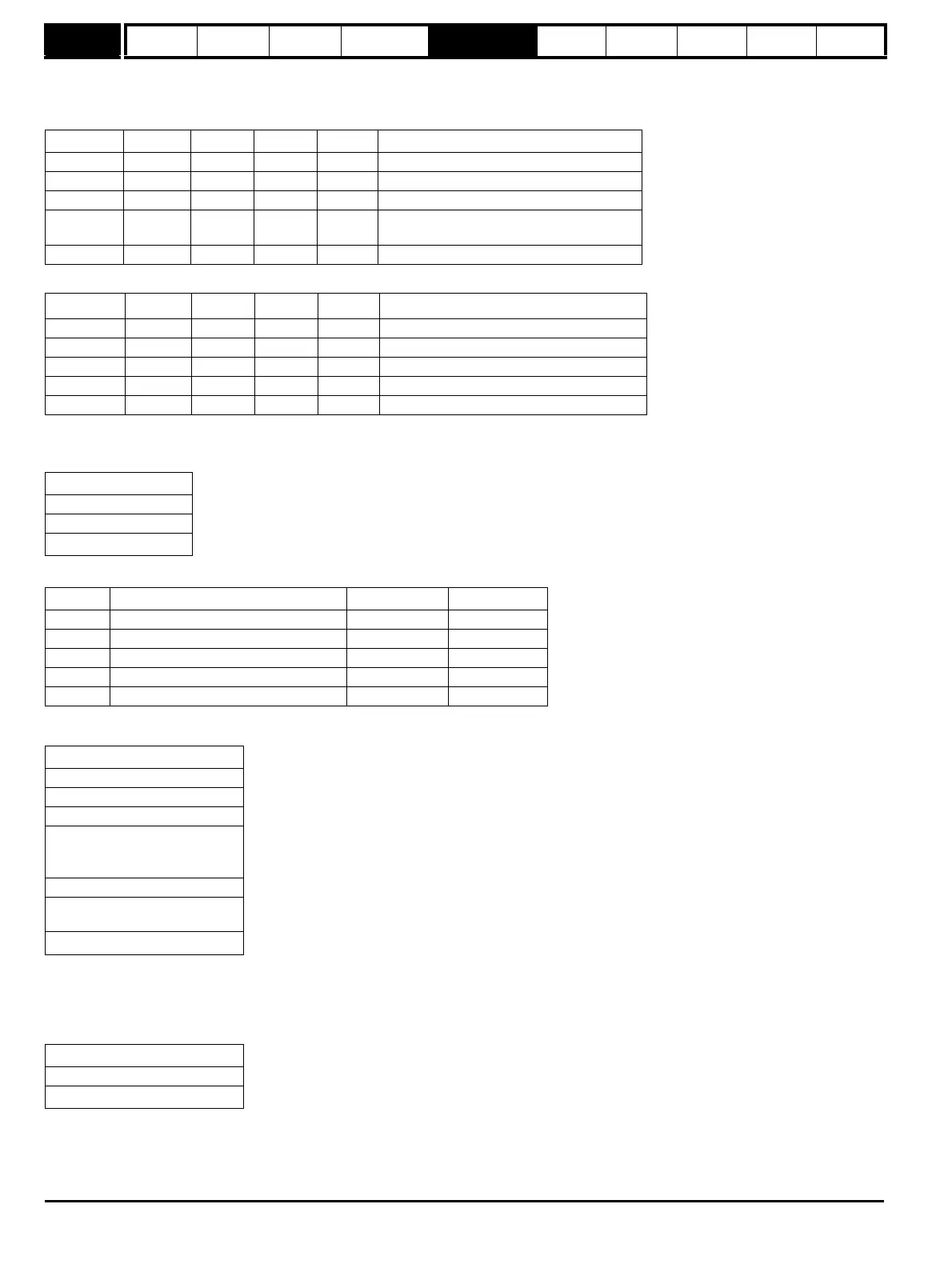
Example of Hiperface transfer: Delete data field
Transfer the "delete data field" message to the encoder comms buffer by writing the sequence of words shown in the table below to Pr 90.22. A check
should be carried out before each word is written to ensure that the parameter is zero (i.e. the drive has taken any previous data).
The response from the encoder is a follows.
SC.EnDat
The Heidenhain EnDat protocol is a synchronous protocol using the following command message format (drive to encoder).
The following commands are supported:
The following is an example of the response when the Encoder to send position command is used (encoder to drive).
The example shown above is for an encoder with 12 bits representing the turns and 13 bits representing the position within a turn. The position
command only requires one byte to be sent to the encoder. Bits 14 and 13 can both be set in the transmit register if required to indicate that this is
both the first and last byte of the message.
If any other command is used then the response is as follows (encoder to drive).
Example of EnDat transfer: Read position
Disable drive encoder position check by setting Pr 90.21 to one. This should be set back to zero at the end of the transfer if encoder position checking
is required.
Bit 15 Bit 14 Bit 13 Data
0xa0ff 1 0 1 0xff Broadcast message so address = 0xff
0x804d 1 0 0 0x4d Create data field command
0x8002 1 0 0 0x02 Data field 2
0x8065 1 0 0 0x65
Status of data existing data field 2 with bit 7
set to zero
0x8055 1 1 0 0x55 Code for data field at default of 0x55
Bit 15 Bit 14 Bit 13 Data
0x8040 1 0 0 0x40 Encoder address
0x8042 1 0 0 0x4d Create data field command
0x8003 1 0 0 0x02 Data field 2
0x8059 1 0 0 0x65 Status of the data field before delete
0x8063 1 1 0 0x78 Checksum
Command
1
st
byte
Address
Data (LSB)
Data (MSB)
4
th
byte
Code Command Address Data
0x00 Encoder to send position Don’t care Don’t care
0x01 Selection of memory area MRS code Don’t care
0x03 Encoder to receive parameter Address Data
0x04 Encoder to send parameter Address Don’t care
0x05 Encoder to receive reset Don’t care Don’t care
LS byte
1
st
byte
Bits 7-0 = 0
Bits 7-0 = 0
Bits 7-0 = 0
Bits 7-0 = 0
Bits 5-0 = 0
Bit 6 = Alarm bit
Bit 7 = Bit 0 of position
Bits 7-0 = Bits 8-1 of position
Bits 3-0 = Bits 12-9 of position
Bits 7-4 = Bits 3-0 of turns
MS byte
8
th
byte
Bits 7-0 = Bits 11-4 of turns
Address
1
st
byte
Data (LSB)
Data (MSB)
3
rd
byte