Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menu 4
Unidrive SP Advanced User Guide 91
Issue Number: 10 www.controltechniques.com
Where:
R
s
is the motor stator resistance (Pr 5.17)
f
R
is the rated frequency (Pr 5.06)
σL
s
is the transient inductance (H) (Pr 5.24 / 1000)
V
R
is the rated voltage (Pr 5.09)
I
sxR
and I
syR
are the currents in the x and y axes of the rotor flux reference frame under rated load
I
sxR
and I
syR
are derived as I
sxR
= Pr 5.07 x √(1 - Pr 5.10
2
) and I
syR
= Pr 5.07 x Pr 5.10 for the purposes of calculating ϕ
2
. This calculation gives a
result that is reasonably accurate for most purposes.
rated active current = cos(
ϕ
1
) x motor rated current
rated magnetising current = √(1 - cos(
ϕ
1
)
2
) x motor rated current
In this mode of operation the drive requires the following parameters to set the maximum current limits, scale the current limits correctly and calculate
the rated active and magnetising currents.
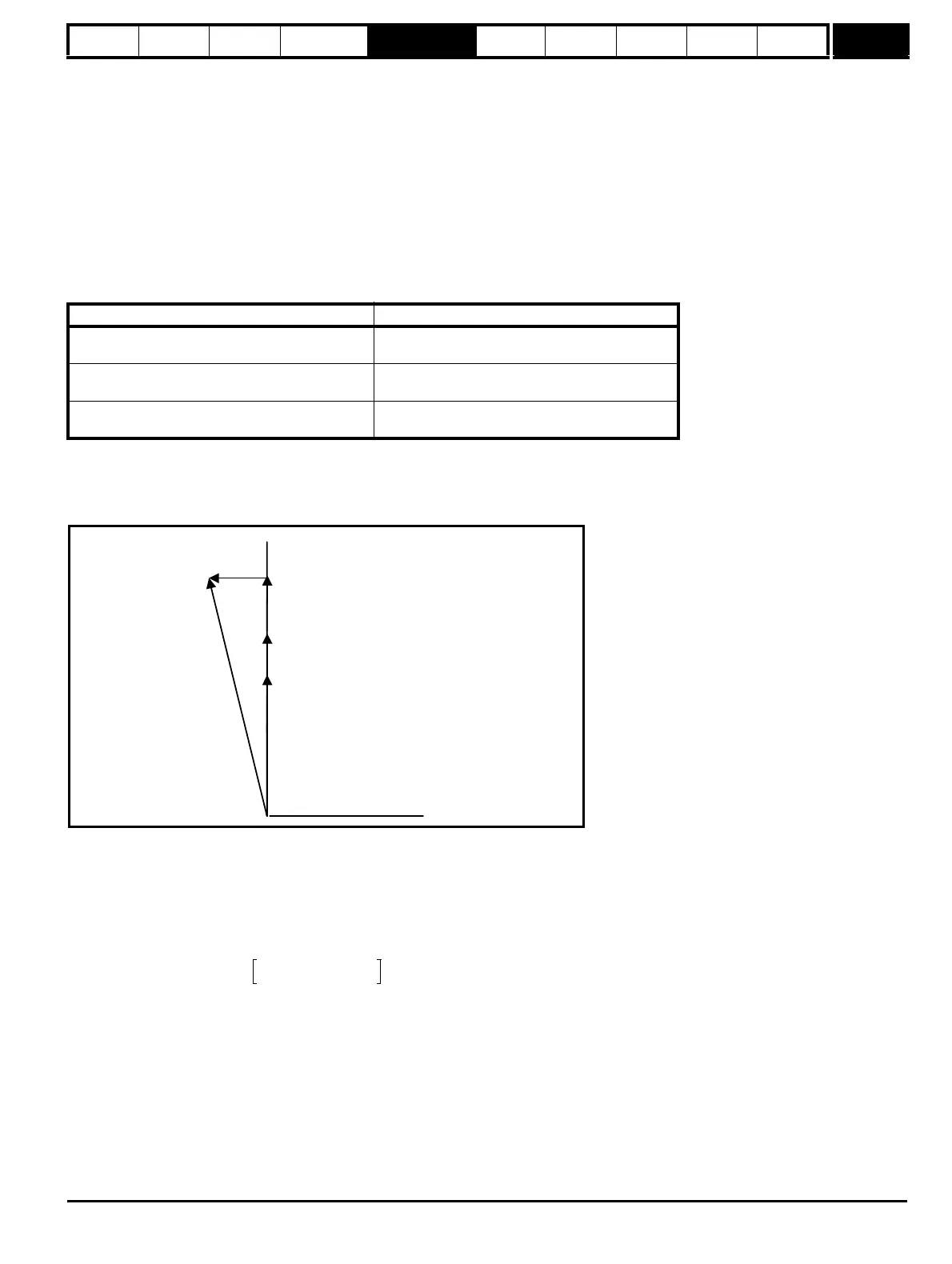
5.6.3 Servo
In this mode the drive operates in the rotor flux reference frame. The maximum normal operating current is controlled by the current limits.
DRIVE_CURRENT_MAX is full scale current feedback, i.e. Kc / 0.45.
The relationship between the voltage and current for Servo operation is shown in the following vector diagram.
Definitions:
v
s
= motor terminal voltage vector
i
s
= motor current vector
V
ϕ = voltage produced by the rotor magnets
MOTOR1_CURRENT_LIMIT_MAX is used as the maximum for some parameters such as the user current limits. The current maximum current limit
is defined as follows (with a maximum of 1000%):
Parameters Current limit accuracy
Motor rated current, power factor at rated load
(R
s
and σL
s
are zero)
Moderate accuracy
Motor rated current, power factor at rated load,
measured values of R
s
and σL
s
Good accuracy
Motor rated current, power factor at rated load,
measured values of R
s
, σL
s
and L
s
Exact current limits based on all measured values
R
s
i
sy
w
mr
σ
L
s
i
sy
v
s
Rotor flux
i
s
v
ϕ
Servo mode
CURRENT_LIMIT_MAX
Maximum current
Motor rated current
-------------------------------------------------------
100%×=

 Loading...
Loading...








