Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menu 1
Unidrive SP Advanced User Guide 35
Issue Number: 10 www.controltechniques.com
See Pr 1.08 on page 33.
These parameters are controlled by the drive sequencer as defined in Menu 6. They select the appropriate reference as commanded by the drive
logic. Pr 1.11 will be active if a run command is given, the drive is enabled and the drive is ok. This parameter can be used as an interlock in a
Onboard PLC or SM-Applications program to show that the drive is able to respond to a speed or torque demand.
Pr 1.14 defines how the value of Pr 1.49 is derived as follows:
*Pr 1.41 to Pr 1.44 can be controlled by digital inputs to force the value of Pr 1.49:
all bits equal to zero gives 1,
Pr 1.41 = 1 then Pr 1.49 = 2
Pr 1.42 = 1 then Pr 1.49 = 3
Pr 1.43 = 1 then Pr 1.49 = 4
Pr 1.44 = 1 then Pr 1.49 = 5
The bit parameters with lower numbers have priority over those with higher numbers.
Pr 1.49 and Pr 1.50 then define the reference as follows:
** x = any value
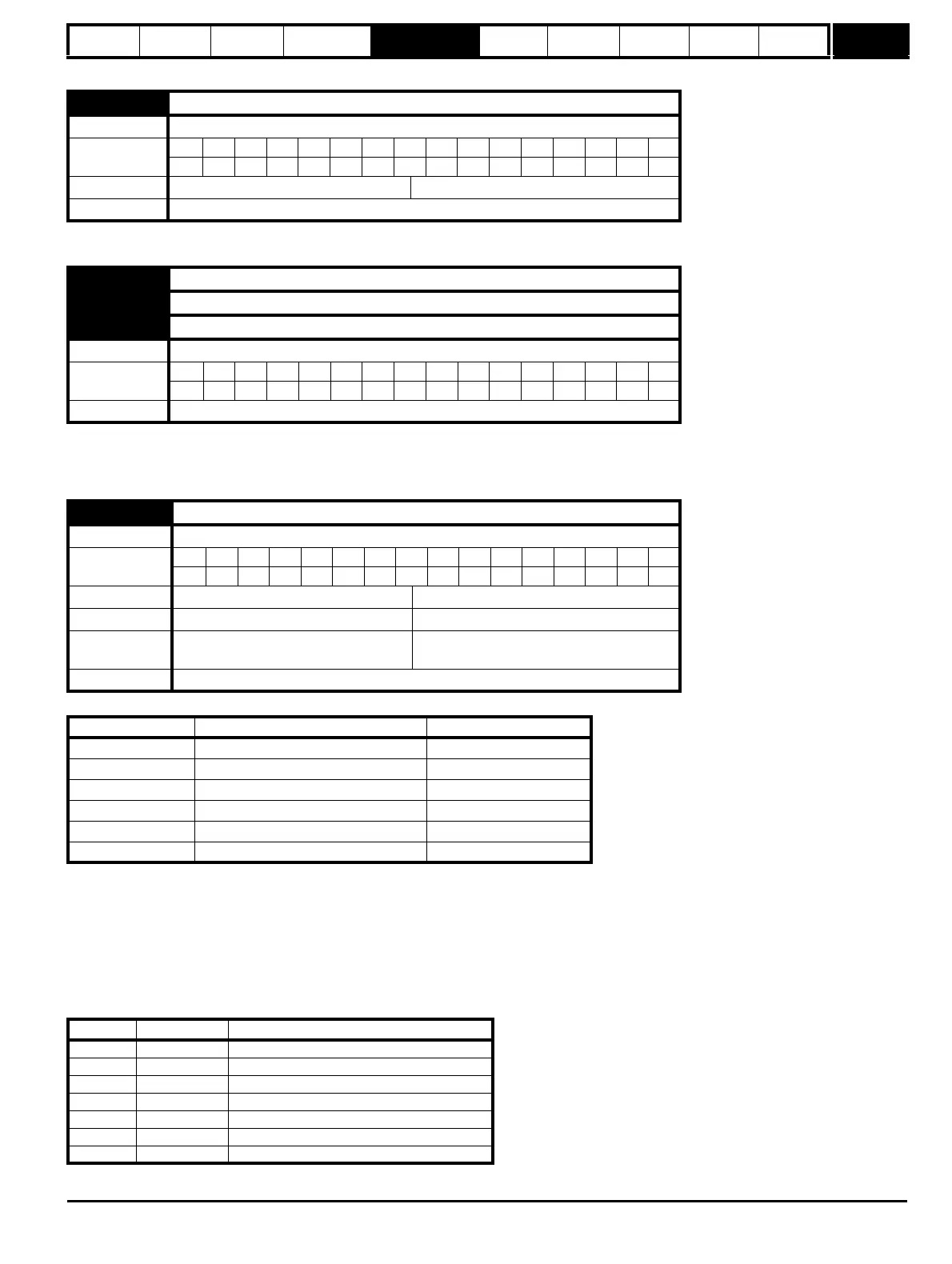
1.10 Bipolar reference enable
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Default Open-loop, Closed-loop vector, Servo 0
Update rate 4ms read
1.11 Reference enabled indicator
1.12 Reverse selected indicator
1.13 Jog selected indicator
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Update rate 4ms read
1.14 Reference selector
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Range Open-loop, Closed-loop vector, Servo 0 to 5
Default Open-loop, Closed-loop vector, Servo 0 (A1.A2)
Second motor
parameter
Open-loop, Closed-loop vector, Servo Pr 21.03
Update rate 4ms read
Value of Pr 1.14 Display String Pr 1.49
0 A1.A2 (Analog ref 1. Analog ref 2) *Selected by terminal input
1 A1.Pr (Analog ref 1. Preset speeds) 1
2 A2.Pr (Analog ref 2. Preset speeds) 2
3 Pr (Preset speeds) 3
4 Pad (Keypad reference) 4
5 Prc (Precision reference) 5
Pr 1.49 Pr 1.50 Reference
1 1 Analog reference 1 (Pr 1.36)
1 >1 Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
2 1 Analog reference 2 (Pr 1.37)
2 >1 Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
3 x** Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
4 x** Keypad reference (Pr 1.17)
5 x** Precision reference (Pr 1.18 and Pr 1.19)

 Loading...
Loading...








