Parameter
structure
Keypad and
display
Parameter
x.00
Parameter
description format
Advanced parameter
descriptions
Macros
Serial comms
protocol
Electronic
nameplate
Performance RFC mode
Menu 1
Unidrive SP Advanced User Guide 33
Issue Number: 10 www.controltechniques.com
See below.
*The range shown for Pr 1.07 shows the range used for scaling purposes (i.e. for routing to an analog output etc). Further range restrictions are
applied as given below.
The same limits are applied to Pr 21.02, but based on the value of Pr 21.01.
(If the second motor map is selected Pr 21.01 is used instead of Pr 1.06 and Pr 21.02 instead of Pr 1.07)
The effects of the reference clamps (Pr 1.06 and 1.07), the negative minimum clamp enable (Pr 1.08) and the bipolar reference enable parameters
are defined below.
The variable maximum limit for reference parameters, SPEED_FREQ_MAX, is defined as:
If Pr 1.08 = 0: SPEED_FREQ_MAX = Pr 1.06
If Pr 1.08=1: SPEED_FREQ_MAX is Pr 1.06 or -Pr 1.07 whichever is the largest
(If the second motor map is selected Pr 21.01 is used instead of Pr 1.06 and Pr 21.02 instead of Pr 1.07)
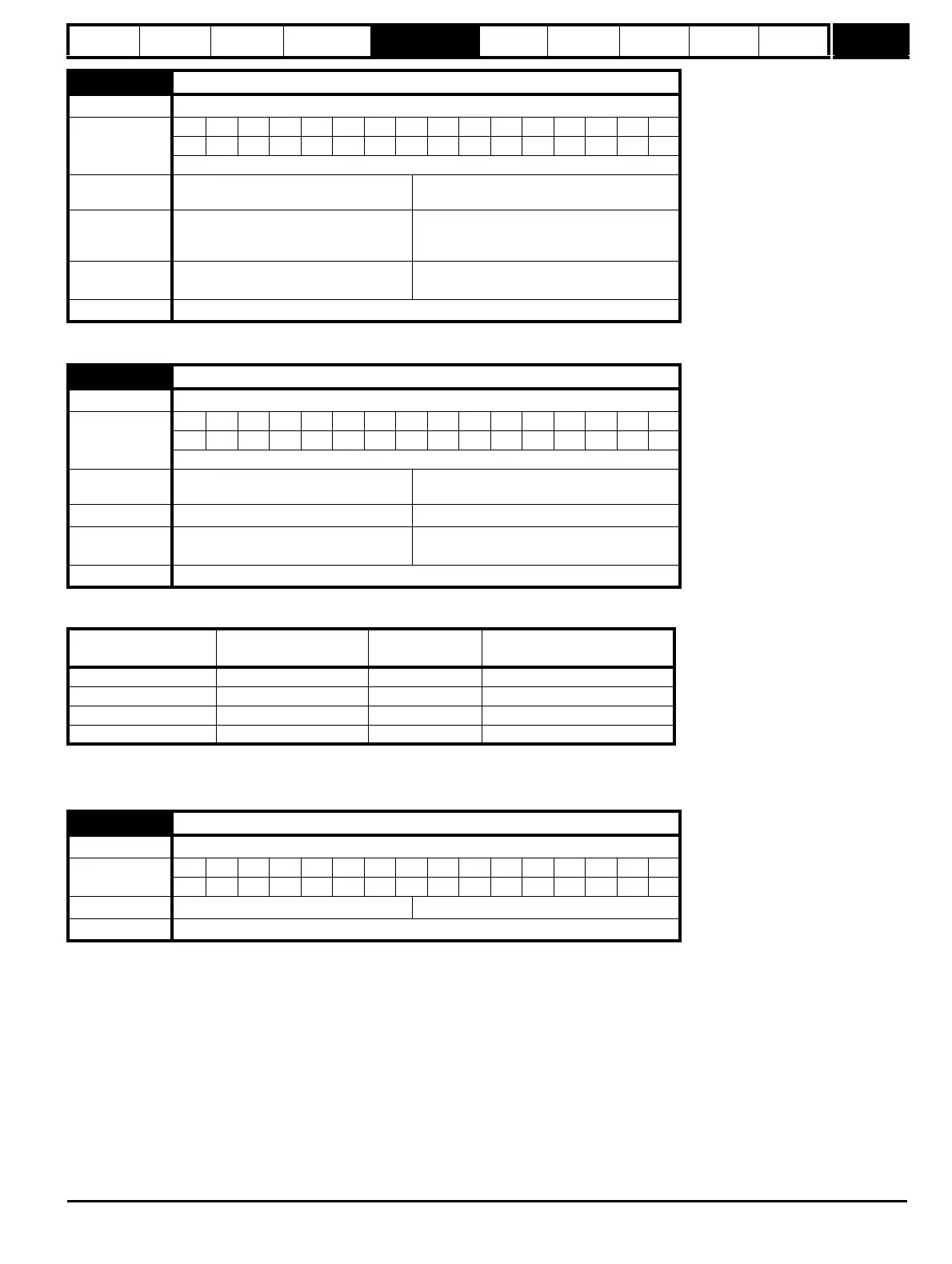
1.06
Maximum reference clamp
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Closed-loop vector and servo: VM = 1
Range
Open-loop
Closed-loop vector and Servo
0 to 3,000.0 Hz
±SPEED_LIMIT_MAX rpm
Default
Open-loop
Closed-loop vector
Servo
EUR: 50.0, USA: 60.0
EUR: 1,500.0, USA: 1,800.0
3,000.0
Second motor
parameter
Open-loop, Closed-loop vector, Servo Pr 21.01
Update rate Background read
1.07 Minimum reference clamp
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
1 111
Closed-loop vector and Servo: VM = 1
Range
Open-loop
Closed-loop vector and Servo
±3,000.0 Hz*
±SPEED_LIMIT_MAX rpm*
Default Open-loop, Closed-loop vector, Servo 0.0
Second motor
parameter
Open-loop, Closed-loop vector, Servo Pr 21.02
Update rate Background read
Pr 1.08
(Neg min ref enable)
Pr 1.10
(Bipolar mode enable)
Open-loop Closed-loop vector and Servo
0 0 0 to Pr 1.06 0 to Pr 1.06
010 0
1 0 -3,000 to 0Hz* -SPEED_LIMIT_MAX to 0 rpm
1 1 -3,000 to 0Hz* -SPEED_LIMIT_MAX to 0 rpm
1.08 Negative minimum reference clamp enable
Drive modes Open-loop, Closed-loop vector, Servo
Coding
Bit SP FI DE Txt VM DP ND RA NC NV PT US RW BU PS
111
Default Open-loop, Closed-loop vector, Servo 0
Update rate Background read

 Loading...
Loading...








