The speed controller remains active during all blockade reactions.
The model shutdown for encoderless operation (A)SCL occurs as preset in the ds
parameters (ds41...ds48 model control). There are no additional parameters for the
blockage.
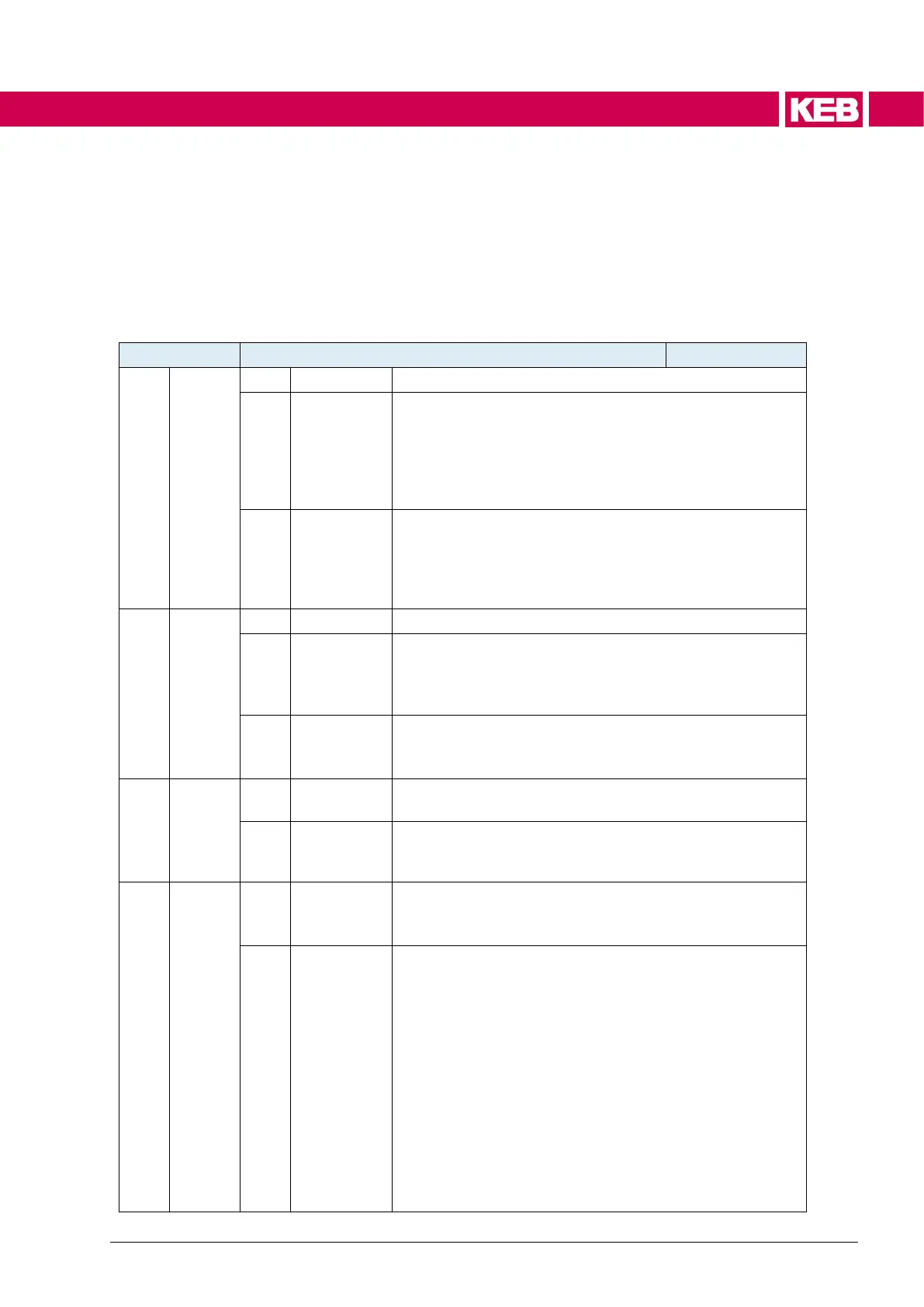
The warning bit is set as soon as the blockage is detected.
(Transition of the status from "blockage detection time run-
ning" to "reaction hold" or "reaction time running")
The warning is reset when the blockage detection state
changes to "blockage detection inactive" or "no blockage
detected".
The warning bit is set as soon as the state "blockage reac-
tion finished" is reached.
The warning is reset when the blockage detection state
changes to "blockage detection inactive" or "no blockage
detected".
Error Blockade is not set
The error blockade is set as soon as the blockade is de-
tected. (Transition of the status from "blockage detection
time running" to "reaction hold" or "reaction time running")
This means that the reaction setting has no function
The error blockade is set after the blockade reaction has
elapsed.
(Transition of the state after "blockage reaction finished")
A blockade reaction once started is always completed; the
speed setpoint has no influence.
abort block-
ade at set
speed zero
If the speed setpoint ru86 standard set speed is zero or re-
versal of the direction of rotation, the blockade reaction is
aborted
Block-
ade re-
action
speed
setting
The internally effective setpoint speed during the blockade
is internally decremented to zero during the reaction time
(allows linear torque reaction)
The internally effective setpoint speed is abruptly decre-
mented to zero at the start of the blockade.
This also initiates the model shutdown in closed-loop oper-
ation without encoder. Thus this setting is suitable to avoid
problems due to instability of the speed estimation at low
speeds in encoderless operation.
The speed controller integral component is loaded in one
cycle with the set torque of the previous cycle. Then the
speed controller is active again. When the blockage is re-
moved, there is no "jerking" of the drive, the torque is con-
tinuously reduced.
However, the torque reduction does not take place at the
linearly decreasing torque limit, but the interventions of the
control are visible.

 Loading...
Loading...










