ple. The difference between setpoint and actual value (deviation) supplies the PID con-
troller. The PID controller adjusts the output frequency of the drive to minimize the devia-
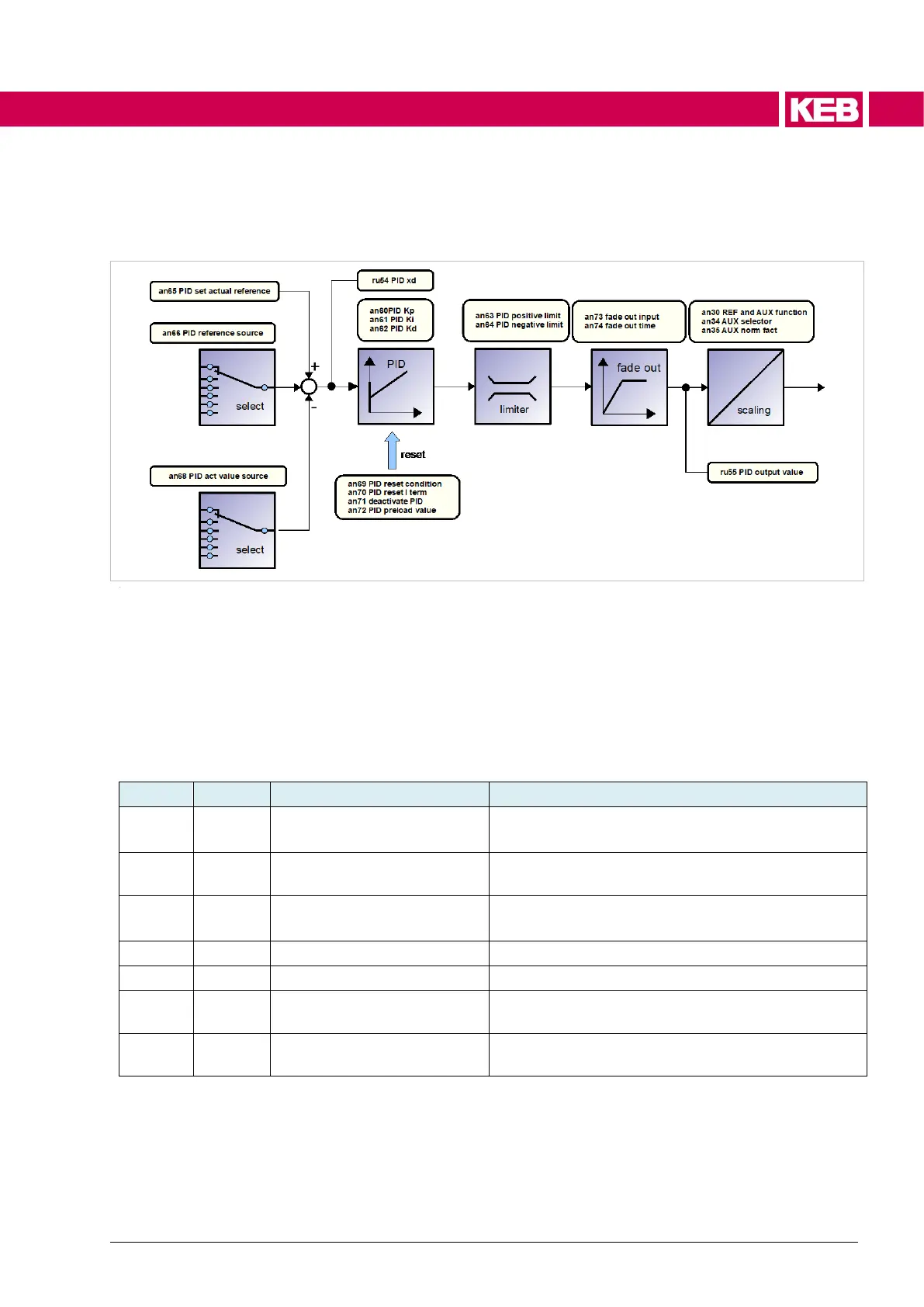
tion, which allows accurate control of system variables.
Figure 128: PID controller
The PID controller will be called by the MidIrq, scan times can be adjusted with is22 Basic
Tp. The reset time T
N
of the PID process controller is not affected by this.
7.3.6.1 PID controller
Definition of the PID process controller:
Setting the P-gain
Factor with 4 decimal places
Presetting of the reset time in ms with 3 decimal
places
Setting gain for the D-component
Factor with 4 decimal places
Positive limit of the PID controller.
Negative limit of the PID controller.
System deviation at the input of the PID controller -
400.0% ... 400.0%
Output value of the PID controller -400.0% ...
400.0%
Input variables, limits and output are standardized in the same way as the analog values.
100.0% corresponds internally 4096. Value range +/-400.0% or +/- 16384.

 Loading...
Loading...










