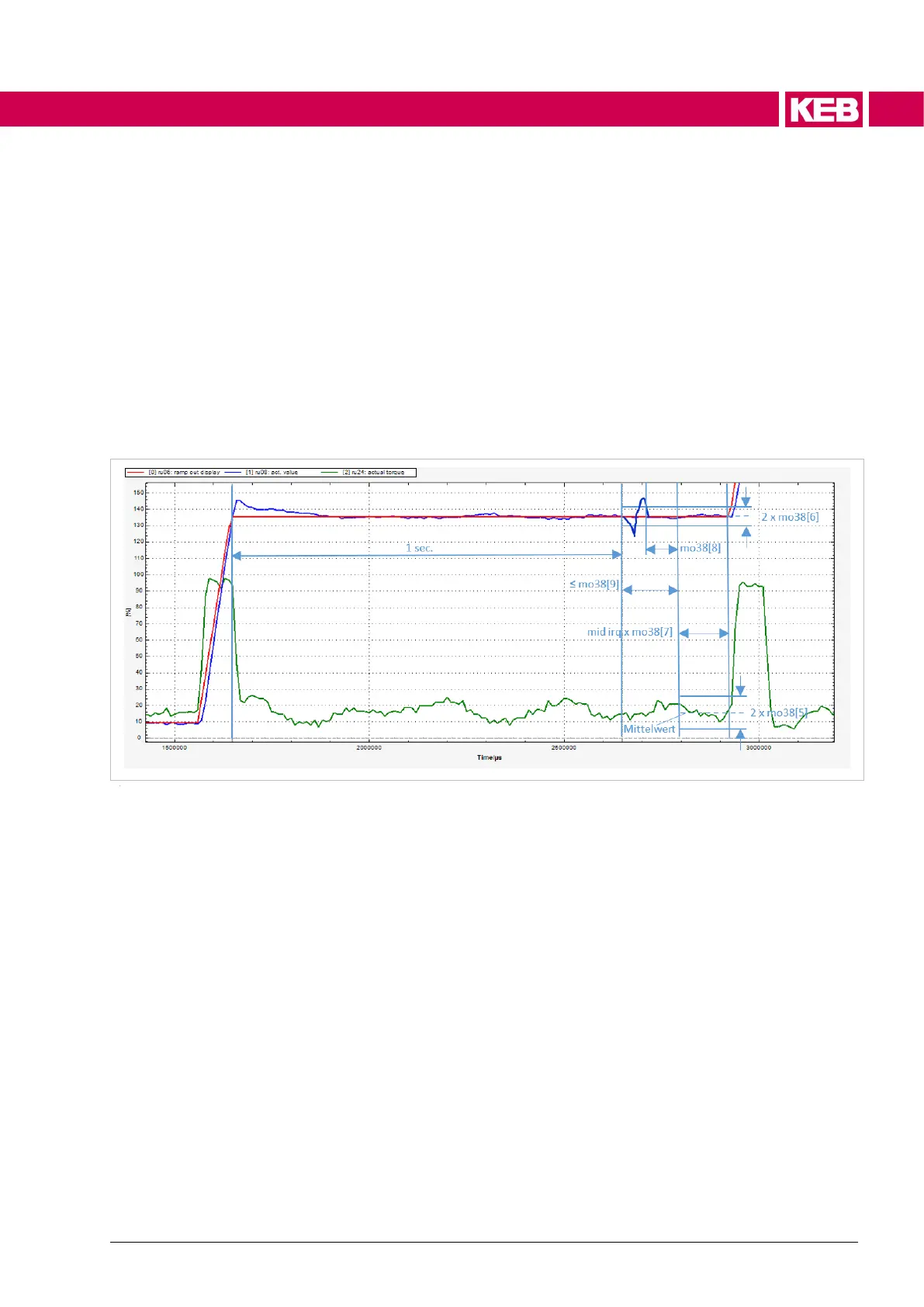
A waiting time of 1 second is generally maintained for this after the ramp output
value has reached the setpoint (= speed for which the torque offset shall be identi-
fied).
Then it is checked whether the actual speed value deviates more than + / - mo38
[6] ident max speed deviation from the setpoint.
If the actual value remains within this window for the time defined in mo38 [8] ident
speed stability check duration the speed is considered stable and the measure-
ment starts.
An error is triggered if the required stability has not been reached after the maxi-
mum allowed time mo38 [9] ident speed max settle duration. (See description of
mo37 torque offset ident error info in the following chapter)
The maximum total time for speed stabilization is total: 1 second. + mo38 [9]
Figure 71: Procedure of the offset measurement
After the actual speed has reached a stable status, the average value of the torque
is formed via mo38 [7] ident torque number of samples values. mo38 [3] ident
torque source specifies whether the filtered or the unfiltered actual torque value
should be used for averaging.
During this time, the speed stability is further monitored. The deviation from the
setpoint shall not be greater than +/- mo38 [6] ident max speed deviation.
The deviation of the individual torque samples from the calculated average value
shall not be greater than mo38 [5] ident max torque deviation.
If the measurement is completed at one speed, the setpoint speed is increased by
moxx speed step fswx and the torque offset is measured for the next speed point.
After all points have been approached, the drive returns to speed 0 and then
switches off the modulation automatically.
If the measurement procedure is interrupted (e.g. due to instabilities of the torque
measurement or the actual speed value), the drive retuens to 0 from the last ap-
proached speed point.
The measurement can be cancelled manually at any time with mo35 torque offset
ident = 0: off.
In addition, the measurement is aborted by deactivation of the modulation - e.g. by
an inverter error (see ru01).

 Loading...
Loading...










