Variable proportional factor ((system deviation)
The proportional gain (Kp) can be increased proportionally to the control deviation.
Thereby the total proportional gain is calculated to:
▪ variable factor = system deviation [% rated speed] * cs03
▪ the variable factor is limited by cs04 speed ctrl limit
▪ Total proportional gain = (1 + limited variable factor) * cs01
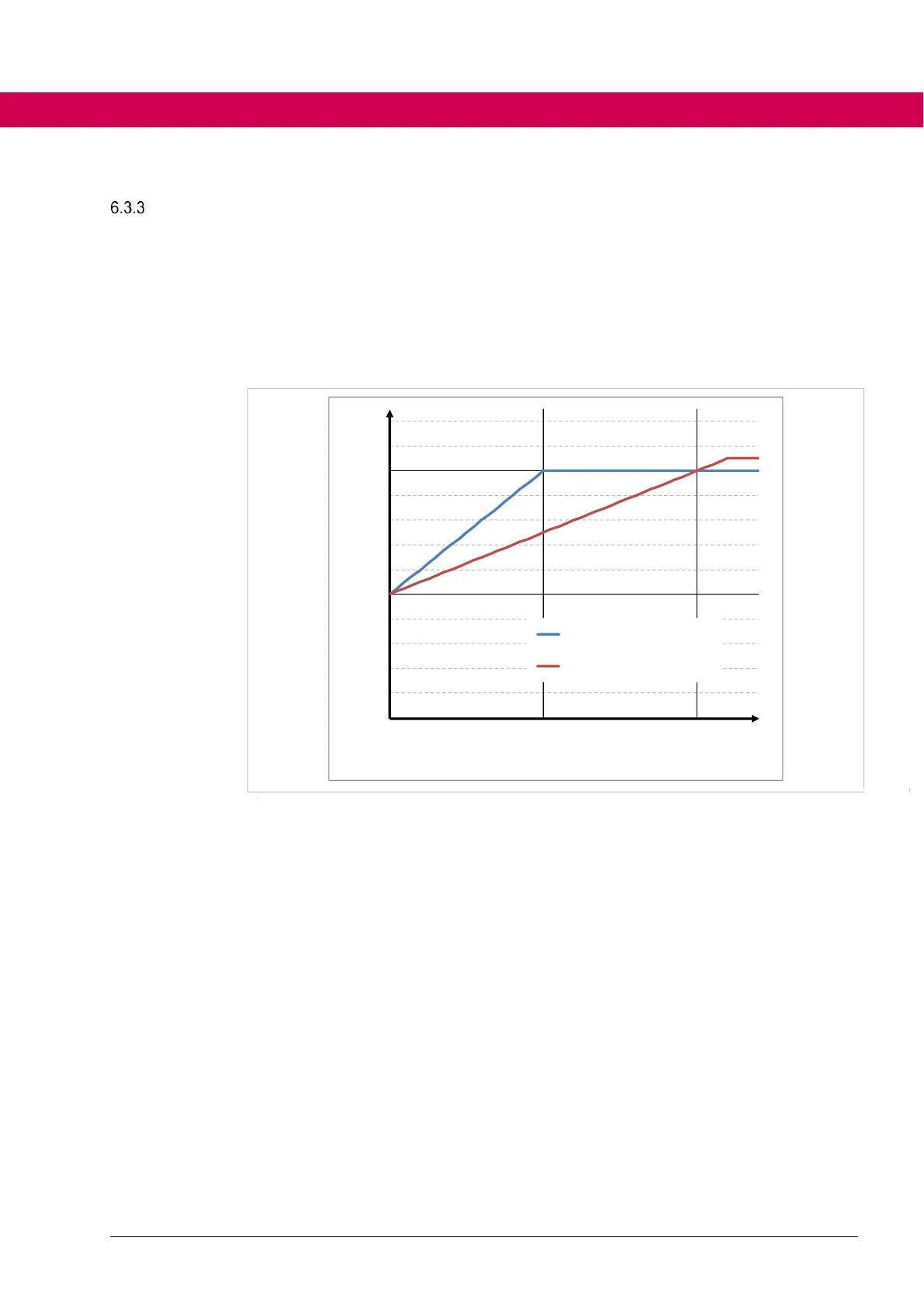
Figure 98: Variable proportional factor
Example:
cs01 = 1.2 [%Mn / rpm]
cs03 = 0.5
cs04 = 150%
Setpoint speed = 100 rpm
Actual speed = 80 rpm
Rated speed = 2000 rpm
=> Xd = (100 – 80) / 2000 * 100 = 1 % rated speed
=> variable factor = 0.5 * 1 = 0.5
=> limitation of the factor with cs04 = 1.5 => no limitation
=> total proportional gain = (1 + 0.5) * cs01 = 1.5 * 1.2 = 1.8
=> Maximum proportional gain = (1 + cs04) * cs01 = 2.5 * cs01 = 3
0
100
200
0 5 10
complete proportional gain / cs01 * 100%
Xd (= reference speed - actual speed) / rated speed [%]
cs03 = 0,2 / cs04 = 100%
cs03 = 0,1 / cs04 = 110%

 Loading...
Loading...










