application-dependent torque limits
In some applications it is not desired to set the maximum possible torque, but the
application requires other process-related limits (e.g. protection of mechanical
components).
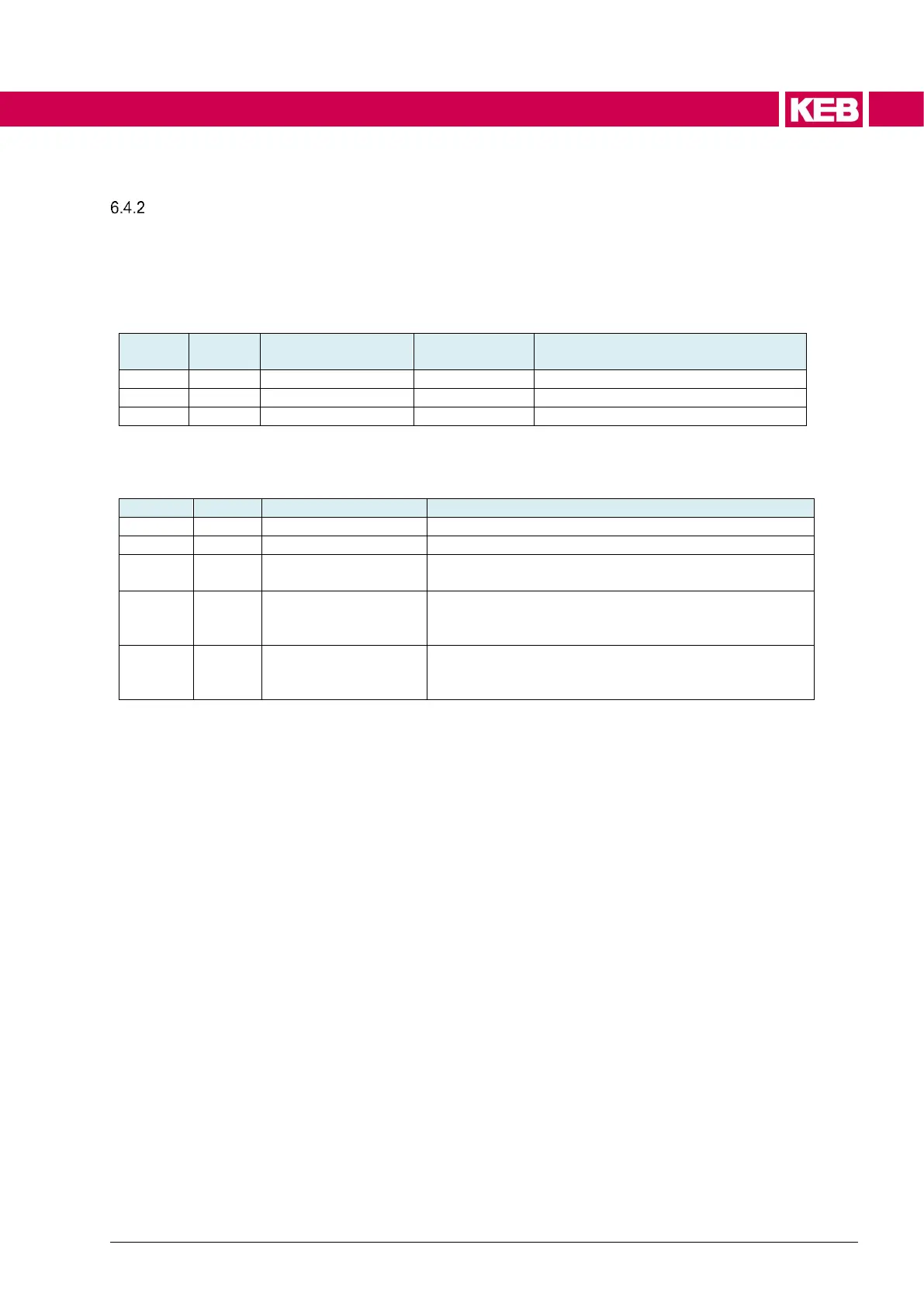
This can be adjusted via parameters cs12…cs16 or via the CIA402 objects 6072h,
60E0h and 60E1h in 0.1% of the rated motor torque.
positive torque limit value
negative torque limit value
The torque limiting characteristic, which is defined by the maximum current and
available voltage, remains acitve as higher-level limit.
Max. torque (applies in all quadrants)
Torque limit mot., positive speed
Torque limit mot., negative speed
-1: mot. forward => Value is accepted from cs13
Torque limit gen., positive speed
-1: mot. forward => Value is accepted from cs13
-2: mot. reverse => Value is accepted from cs14
Torque limit gen., negative speed
-1: gen. forward => Value is accepted from cs15
-2: mot. forward => Value is accepted from cs13
An absolute limit can be defined with parameter cs12 absolute torque which should
not be exceeded in the application and remains active in all operating ranges.
Parameter cs13 torque limit mot can be used if only one limit is required for all op-
erating ranges (forward, reverse, motor and regenerative operation). Then the lim-
its cs14…cs16 must be set to -1.
If different torque limits are required, enter these limits in parameters cs14…cs16
(= torque limit for different operating ranges).
A special torque limit can additionally be set for the emergency stop (fault reaction
ramp) (=> Chapter 4.3.1.2.5 Error reaction/stop_function torque limit).