4.8.1.5 Positioning with start speed
Positioning can also be started directly from a setpoint, note that the DRIVE is in a
constant movement (no ramps active). Furthermore, the setpoint must be within
the limits of ps30 or ps40. If you do not follow these instructions, errors may occur
in the profile calculation and the drive may not reach the desired position directly.
After stopping, the required position is then automatically approached in a second
positioning.
4.8.1.6 Position controller
In "Profile position mode“ the position controller is always active by default. The po-
sition controller is always active with ps00 position control mode = 1 "auto (De-
fault)“ or 2 "on“.
Also in operating mode 1, both setpoint speed and set position values can be pre-
set to the drive.
If setpoint speeds are preset in operating mode "1: profile positioning mode" when
the position controller is activated, they are integrated and a target position is cal-
culated (st37 demand position). If the drive cannot follow the setpoints exactly, the
actual position is adjusted via the position controller.
If this permanent activity of the position controller is not desired, it can be switched
"off" with ps00 position control mode = 0.
st37 demand position and st36 following error are set to zero.
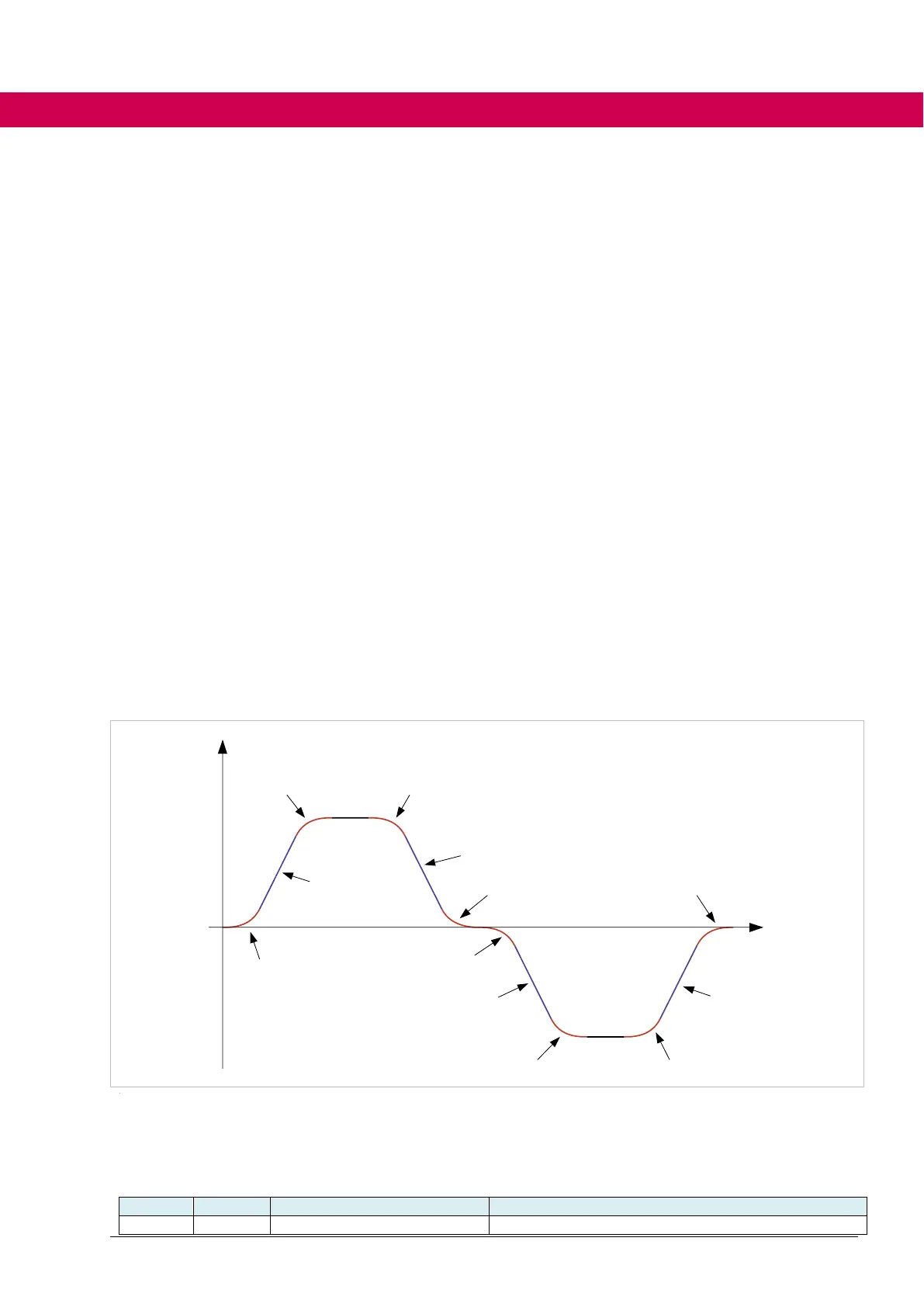
4.8.1.7 Ramps in profile position mode
Figure 30: Ramps in profile position mode
The behaviour of the ramp generator can be adapted to the requirements of the
application via object ps60 ramp mode.

 Loading...
Loading...










