revolutions are 0. By way the revolutions can be set to a defined value if they are
no longer reliable.
The revolutions can only be deleted if there are no encoder errors for battery-buff-
ered encoders.
Only the revolutions are set to 0 with bit 2, i.e. if the entire position shall be set to 0,
then bit 0 "set zero position" of ec36 must be set.
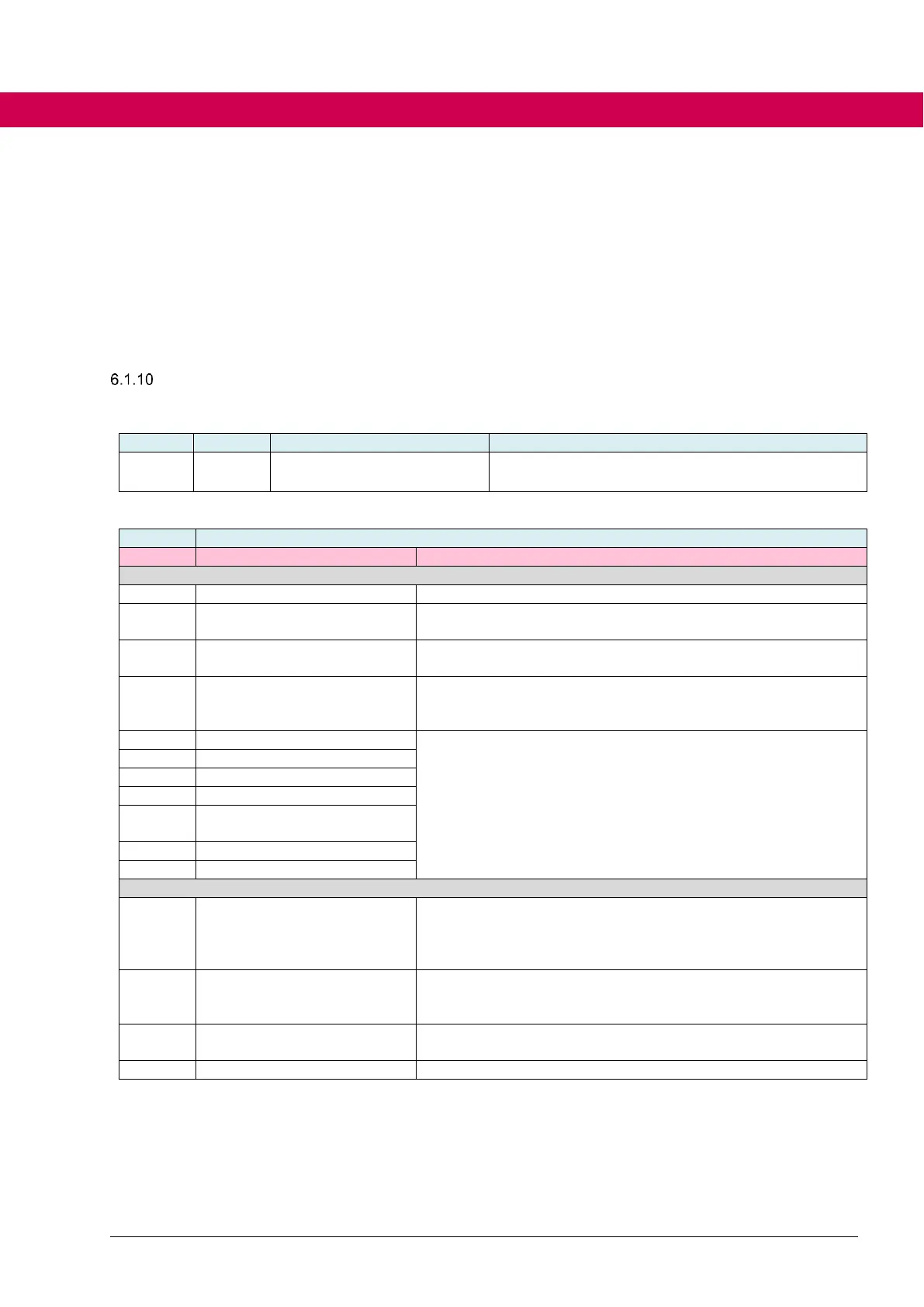
Error and warning messages
6.1.10.1 Error messages of the encoder interface
Error message of the encoder interface
Error during switching on the power supply, e.g. current is too
high or short circuit
wrong enc type combination
EnDat digital is set on one channel and EnDat+1Vss on the
other channel, which cannot be evaluated together.
read motor temp. via encoder
A serial communication error has occurred while reading the
motor temperature via the encoder. (Motor temperature sensor
is connected to the encoder and is evaluated by it)
int. comm: Tx still active
Internal communication between main CPU and encoder eval-
uation
int. comm: Rx still active
int. comm: no. of received
data
int. comm: faulty stop bit
int. slow comm: BCC error
Communication to the encoder could not be established al-
ready during the initialization, e.g. wrong encoder, missing sup-
ply voltage or problem of the encoder cable. Are 1Vss signals
possibly detected in ec17?
Already during the initialization no 1Vss signals could be de-
tected. But Endat with 1Vss is adjusted as encoder type. Is the
communication ok?
The encoder identifier (from word 14 of the manufacturer pa-
rameters) is not supported.
EnDat version is neither 2.1 nor 2.2 and is not supported.

 Loading...
Loading...










