The value for cs19 ref speed PT1-time is calculated as follows:
encoderless operation ( (A)SCL )
cs19 = ec26 / 2 + ec27 + Td
*1
cs19 = ds27 + ds28 + Td
*1
*1
controller reciprocal of amplification time Td = 0.5…1.5ms
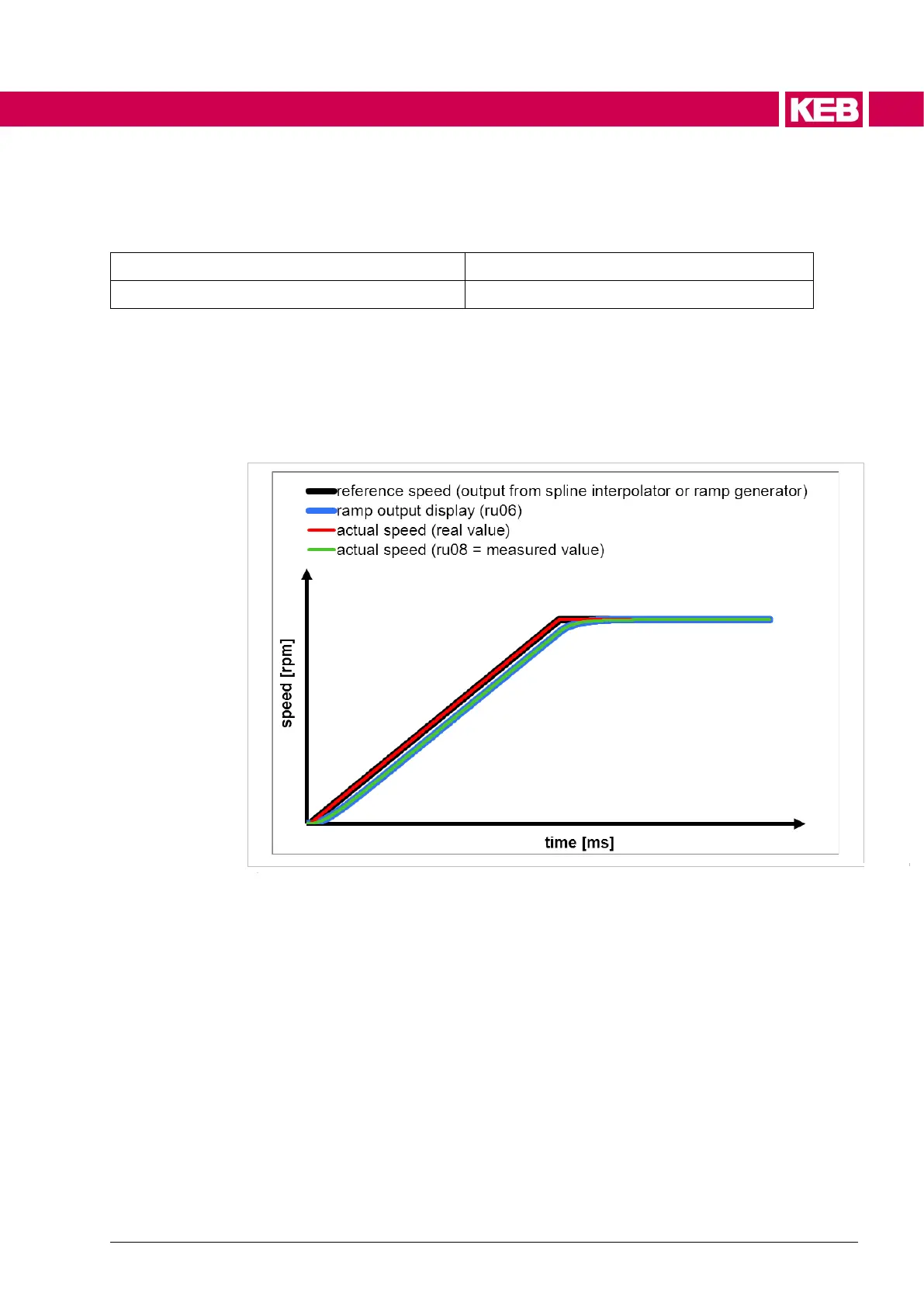
Thus for the speed controller the setpoint speed applies with the actual speed and
the precontrol torque. Since both are decelerated the same, also the real speed
and the setpoint speed of the ramp generator / spline interpolator are suitable.
Figure 108: Optimal precontrol behaviour
The optimal behaviour, as shown in the figure above is only approximately reacha-
ble.
As shown in the figure for the structure of the position and speed control (Chapter
6.6) there are three Pt1 elements (cs18 ref position PT1 time, cs19 ref speed PT1
time and cs20 torque ref PT1-time) to adjust the three control circuits.

 Loading...
Loading...










