PI-speed controller
The speed controller is a PI controller which is defined by its total gain (cs01 / valid
for the proportional and integral part) and the reset time Tn (cs05).
The proportional factor Kp and integral factor Ki of the controller is internally calcu-
lated from these parameters.
Additionally, there is the possibility to influence the proportional part depending on
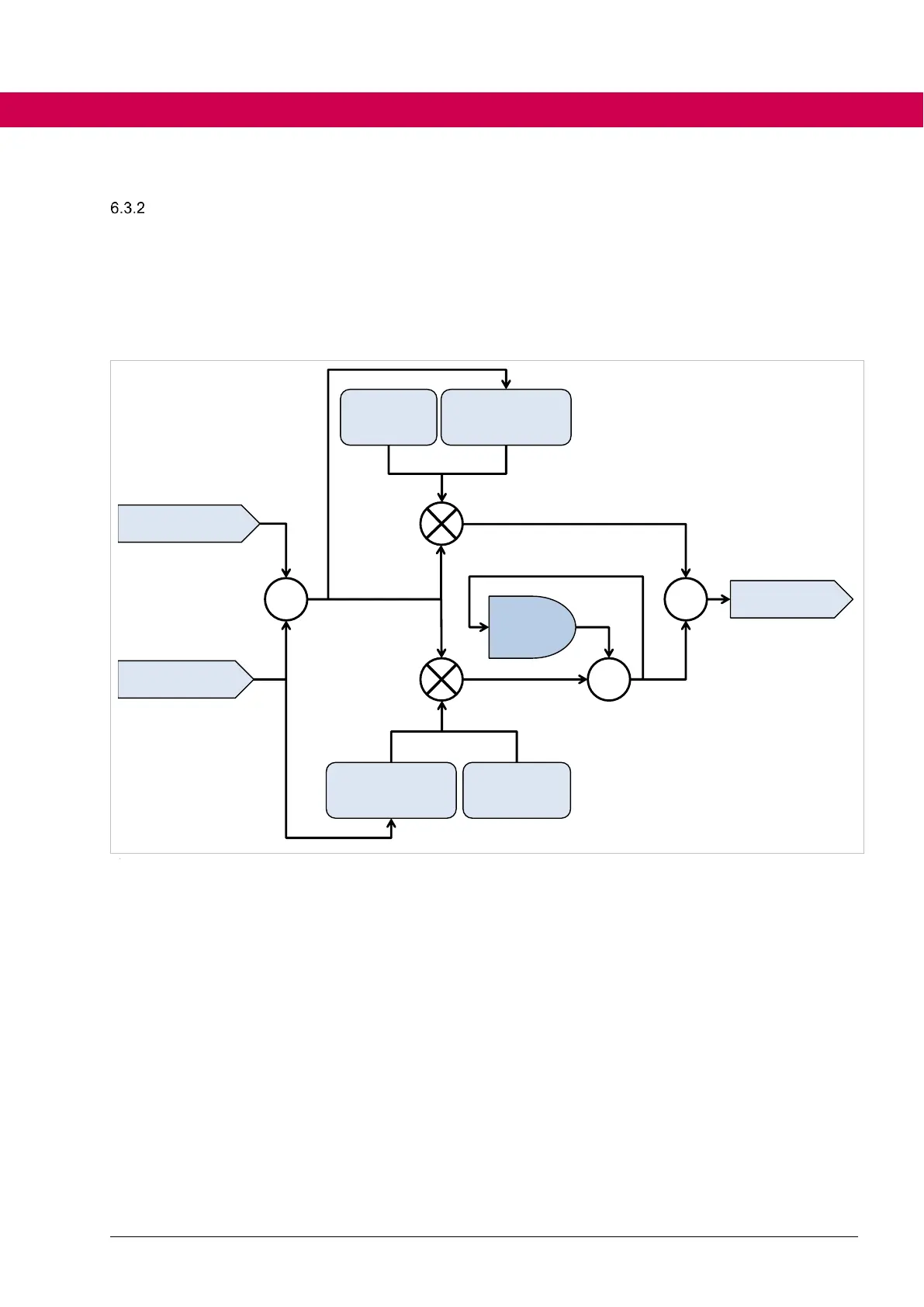
the system deviation and the integral part depending on the actual speed.
Figure 97: Pi-speed controller
In order to improve the control performance of the drive (smaller overshoot, higher
dynamics), the speed controller can be pre-controlled with known mass moment of
inertia.
The gain cs01 KP speed and reset time cs05 Tn speed of the speed controller can
be calculated automatically by the drive. Therefore the mass moment of inertia of
the entire system dr32 inertia motor (kg*cm^2) + rigidly coupled load cs17 inertia
load (kg*cm^2) must be entered.

 Loading...
Loading...










