6.2.16.2 Limits for estimate speed controller
6.2.16.2.1 Free
In this mode there is no estimated speed limit. Mandatory for the operation in
torque limitation, if the drive is pulled in inverse direction to the target speed.
6.2.16.2.2 depending on reference:
The limits are preset depending on the set speed. Useful to avoid an estimation
fault in negative direction and thus a turn into the "blocked direction“ at start from
standstill e.g. with positive set speed.
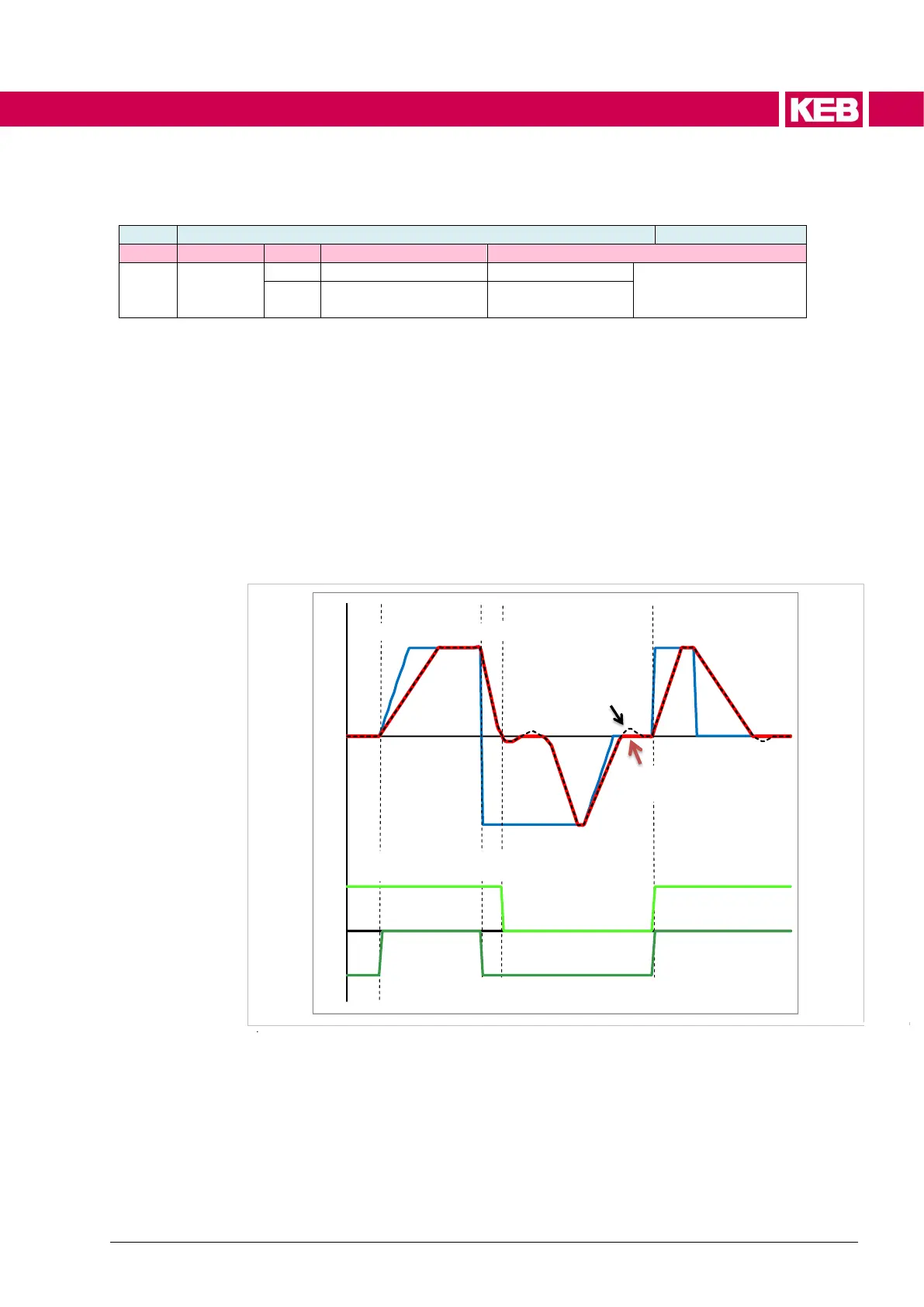
Figure 90: Torque limit depending on the setpoint value
The estimated speed is idealized displayed, in reality there can be more deviations
between real and estimated (calculated) speed.
ru06: ramp output display
ru08: actual value
(estimated speed)
pos limit for speed estimation
neg limit for speed estimation
real speed

 Loading...
Loading...










