6.2.10.3.2.1 Limit value at synchronous motors
The negative limit for the maximum voltage controller for synchronous motors is
defined with fc05:
Maximum current, that shall be supplied from the
maximum voltage controller for compensation of the
pulse wheel voltage (% to rated motor current).
The optimal limit value is depending on the motor data (motors designed for field
weakening) and is often in the range of 100%...200% of the rated current.
The maximum possible torque can not be reached if the limit is selected too low.
The controller can remain at the limit if it is selected too high.
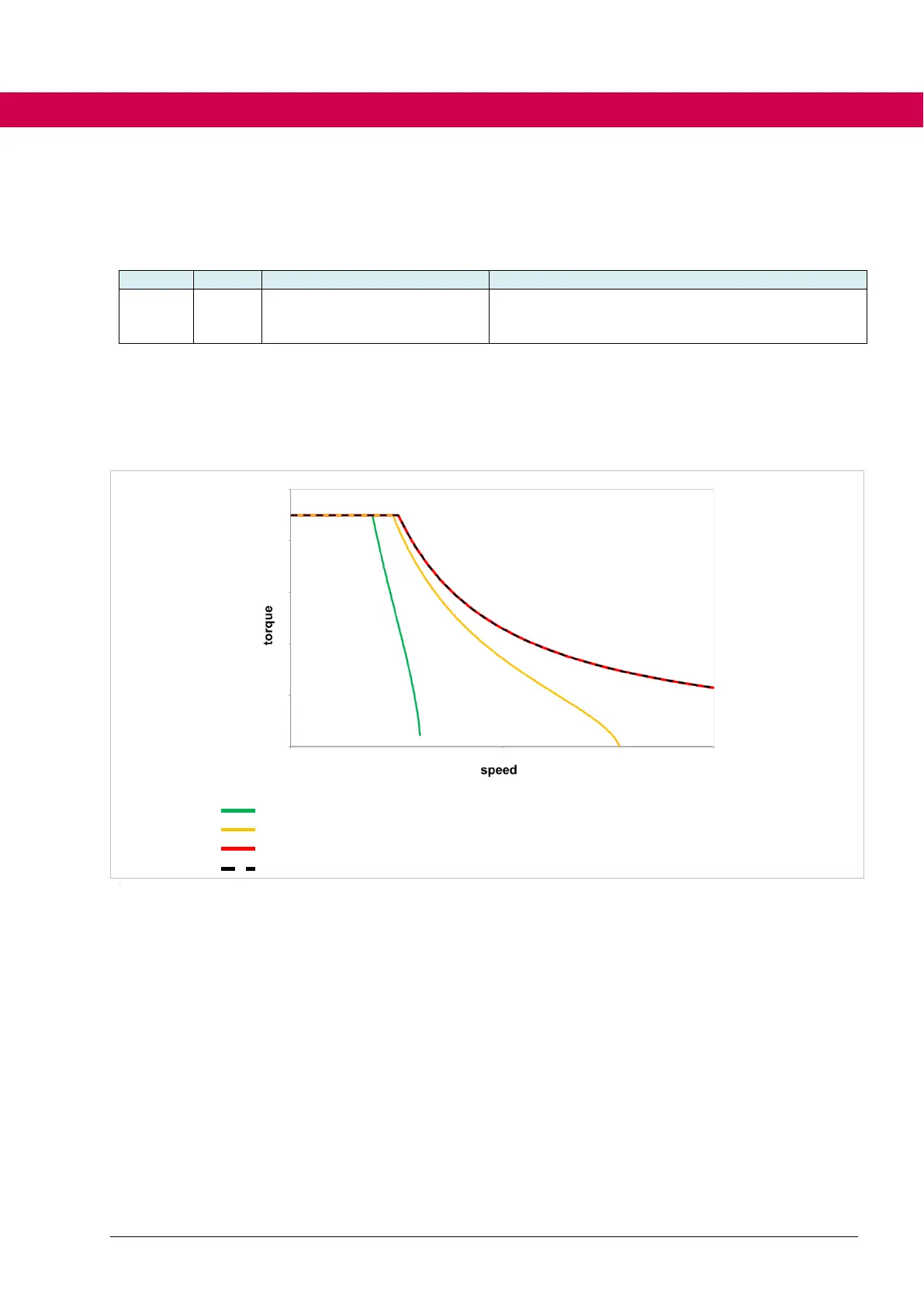
without maximum voltage controller, Id=0
with maximum voltage controller, Id < opt. Id
with maximum voltage controller, Id = opt. Id
1/x
Figure 75: Limit value at synchronous motors
6.2.10.3.2.2 Limit value at asynchronous motors
The limit value at asynchronous motors is selected by way that the set flow by the
controller can be reduced always about 75%.

 Loading...
Loading...










