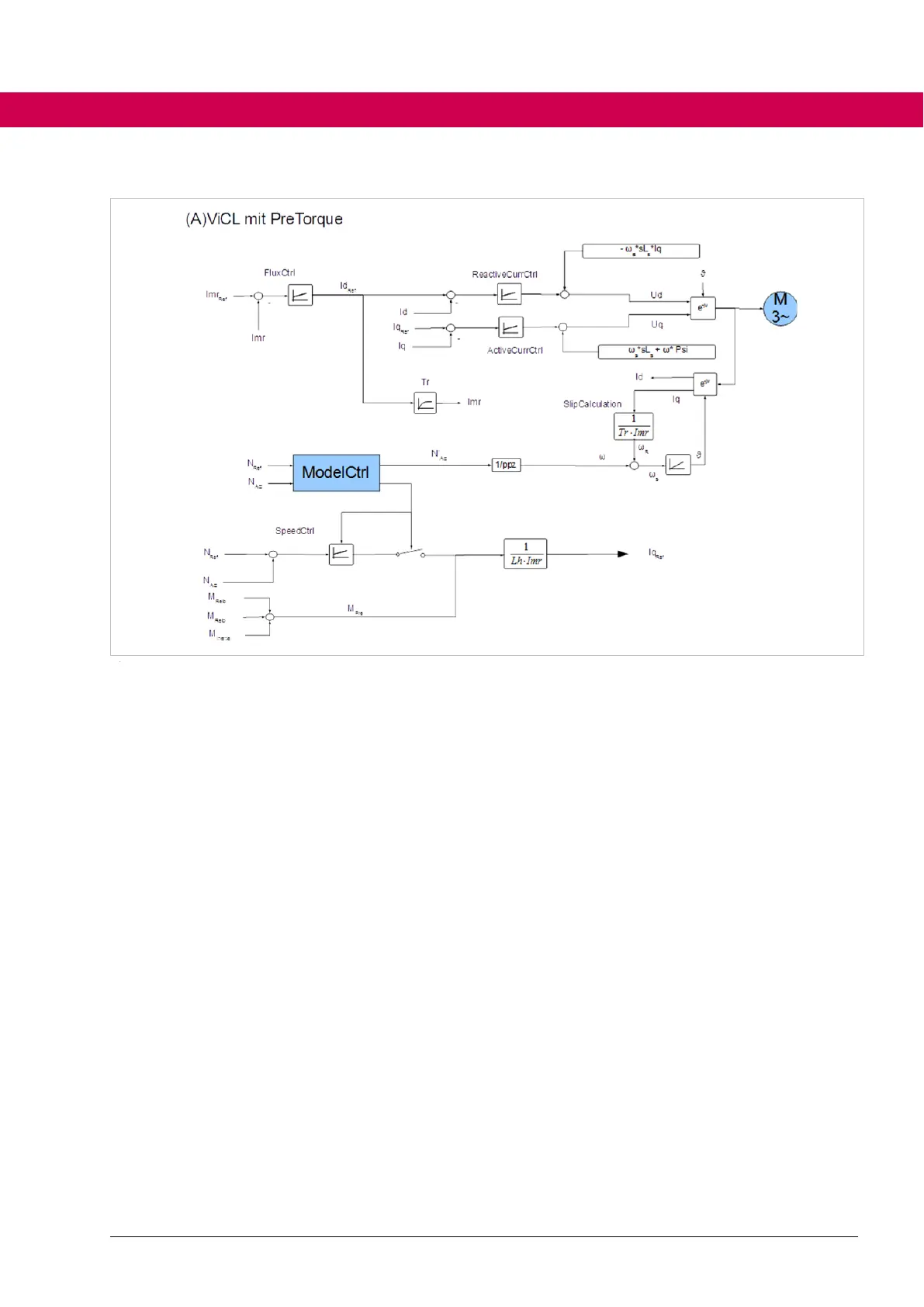
Figure 89: Model deactivation depending on the motor type
6.2.16.1.6 Model replacement (“low speed ctrl” ds41 (Bit 8…9) = ASiCL), only for asynchronous ma-
chine
The ASiCL mode is based on the equivalent circuit data (Lh,Rs,Rr,sLs,sLr), which
are also required for model operation.
The settings for the speed controller and the torque limits from closed-loop opera-
tion have no effect. The current limits are active. The actual torque is calculated,
but only serves as a guide value.
This operating mode is designed for stable concentricity at low speeds and motor
operation.
Applications such as lifting/lowering are not possible, as regenerative operation is
only reliably detected from approx. 5% of the rated speed.
The error in the stator resistance is important for the stability of the operation. How-
ever, this inevitably results in deviations between estimated and real speed under
load at low speeds.
The setpoint speed serves as precontrol. Therefore, the ramp times must be
adapted to the mass inertia and the possible currents. If this mode is used as
bridging to model operation, this must be taken into account. This means that ac-
celeration at the torque limit is not possible!
The magnetizing current setpoint is calculated identically to the closed-loop opera-
tion and is controlled by a current controller in the d-axis. The active current adjusts
itself automatically, thus "boost and slip" is set.

 Loading...
Loading...










