The behaviour depends on the setting in ps31 (CiA 0x6082) end velocity or ps41
index end speed. The bit "target reached" (TR) is set immediately after completion
of the pre-control profile if the target speed (ps31 or ps41) is not equal to 0. Other-
wise the target window (ps14 (CiA 0x6067) positioning window and ps15 position-
ing window time) is considered.
the pre-control pro-
file at the target
has expired
the pre-control profile at the target has expired
➢ ps14 (CiA 0x6067) positioning window defines a position
window symmetrically to the target position (position win-
dow = target position +/- ps14).
➢ ps15 (CiA 0x6068) positioning window time defines the
time the drive must be in this target window.
➢ The drive is in the target window for the time ps15 (tar-
get position +/- ps14).
Attention, when reaching the target position, bit 4 in the co00 (CiA 0x6040) control-
word must no longer be set in order to trigger bit 10 target reached in the st00 (CiA
0x6041) statusword.
To start a new positioning, the positioning must be completed. A completed posi-
tioning means:
• the bit target reached is set for single positioning
• the drive is in the target window in the following positioning
If a new positioning shall be started without finishing the previous one, this is only
possible via the bit change set immediately or by removing the modulation release.
4.8.1.13 Examples for rotary table positioning
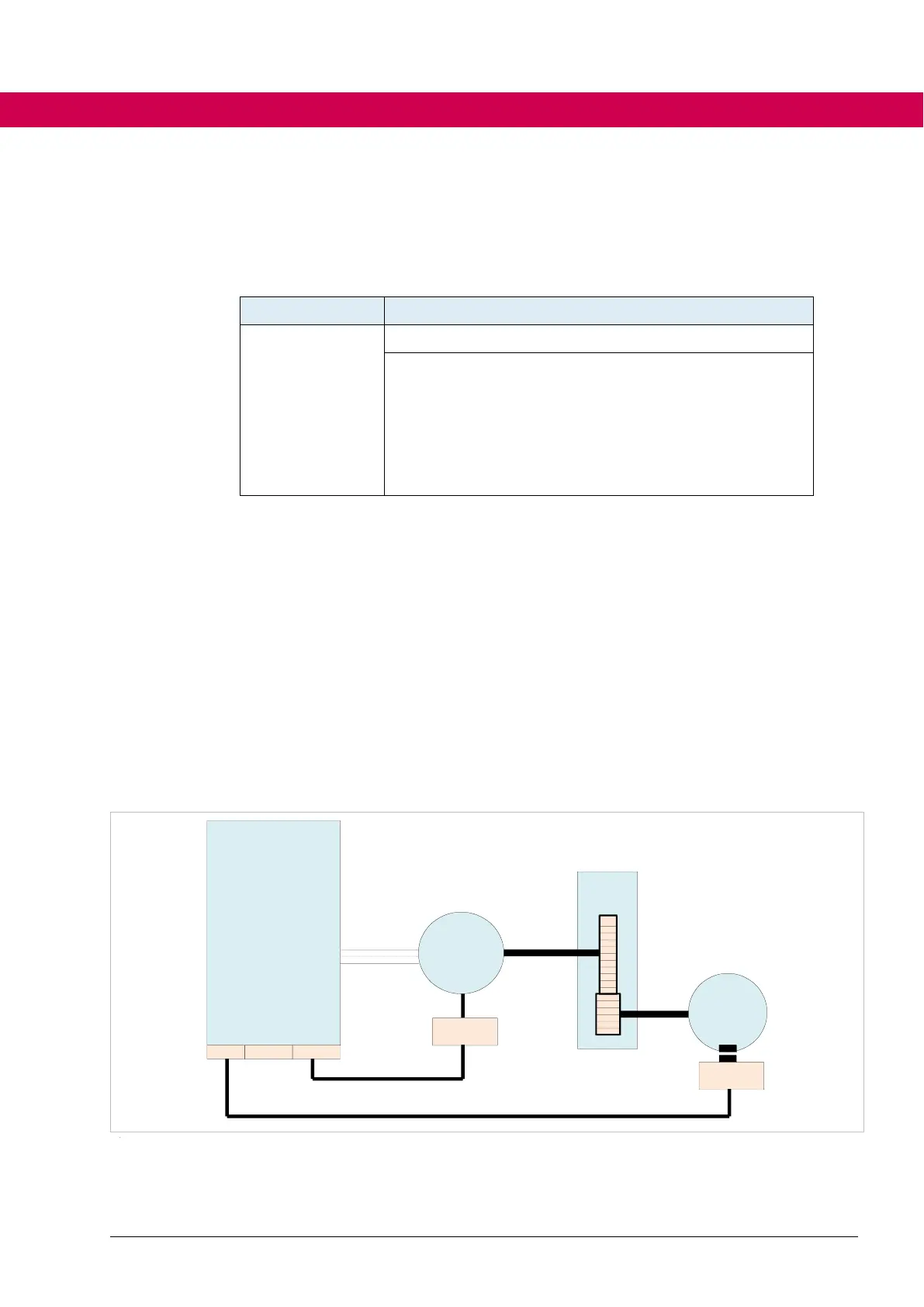
4.8.1.13.1 Motor encoder with initiator at rotary table
Figure 31: Motor encoder with initiator at rotary table
In this example the value range of the rotary table is monitored only by an initiator.
A non-integer gear factor can be compensated.
M
3~
Combivert F6
Initiator
Gear
Circular
table
Encoder
Enc AEnc BX2A

 Loading...
Loading...










