Example:
The motor parameter (dr12) also serves to the definition of the saturation charac-
teristic, except for the limitation of the current (=> chapter 6.2.13 Saturation charac-
teristic (SM) Parameter ms00). This value may not be changed in some applica-
tions.
Here it may be useful to limit the maximum current via is11.
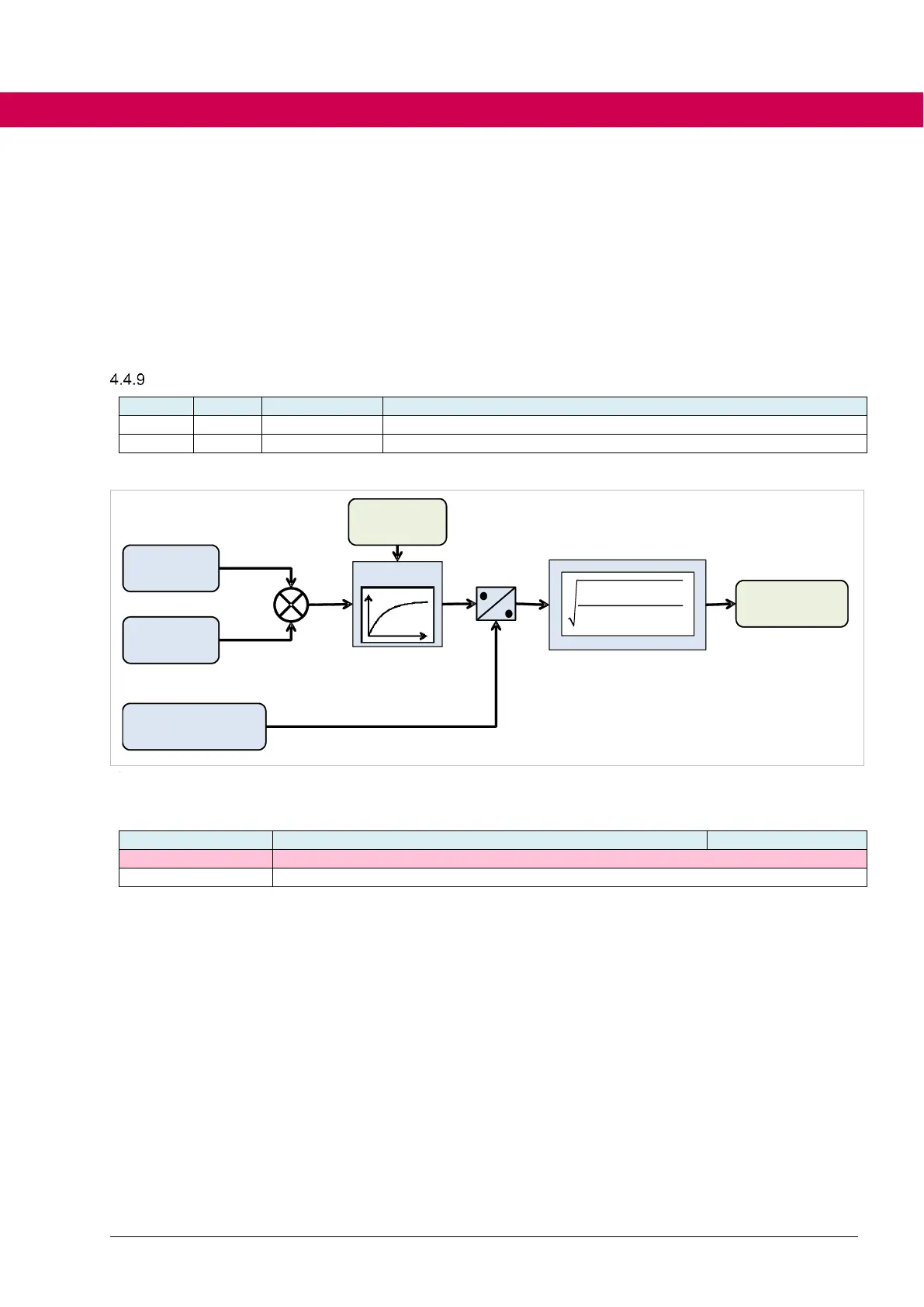
Effective motor load
ru57 eff. motor load is a pure information parameter, no fault response can be de-
ducted.
The time to reach the final value of the function is a multiple PT1 time because of
the root function. Trends for the effective motor utilization can be estimated quickly.
The display area for the effective utilization is limited to max. 8-fold rated motor
current. If the actual motor current exceeds this value, the result behind the PT1
filter is limited. Short peaks in the motor current are detected and evaluated, only
the effective utilization is limited.

 Loading...
Loading...










