Since the ideal setting for the target approach (i.e. at low speeds at the end of the
positioning profile) is often too hard for the positioning process with high speed, the
gain can be weakened with ps03 / ps04.
KP speed limit reduction %
Setpoint-dependent reduction of the KP position controller
Speed value for KP reduction by the value of ps03
The weakening depends on the setpoint speed, which is calculated from the posi-
tioning profile. The setpoint speed, which is the output of the position controller, is
not considered.
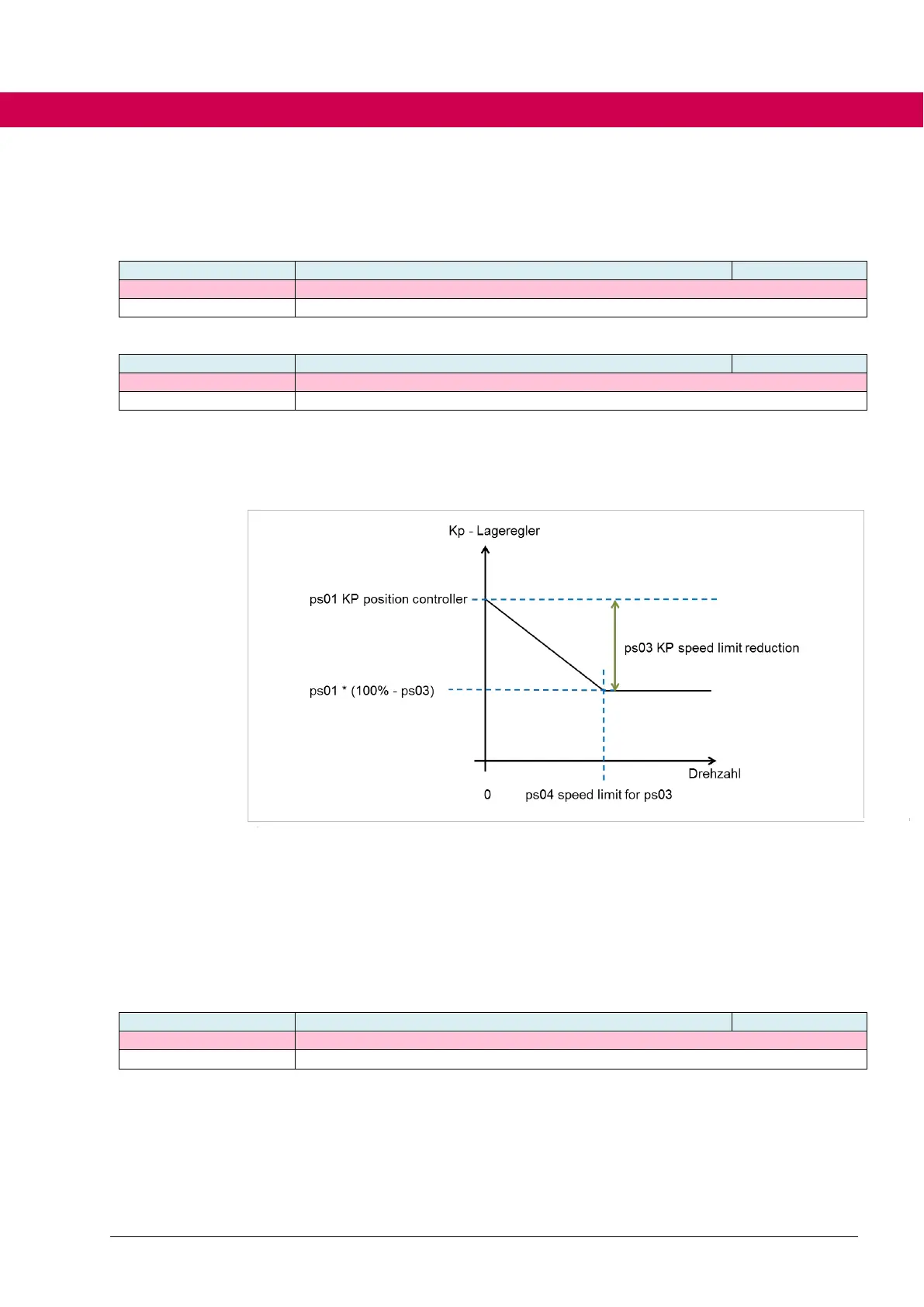
Figure 111: KP reduction in the position controller
The gain is weakened from speed 0 to the level of ps04 speed limit for ps03 by the
value set in ps03 KP speed limit reduction.
This means: If ps03 is 75% and ps04 = 1000 rpm, the gain (the Kp from ps01) is
reduced from 100% to 25% (weakened by 75%) from profile speed 0 to 1000 rpm.
6.5.3.2 Standstill position control
KP zero speed position ctrl
Additional gain factor at setpoint speed 0
If a very high position rigidity is only required at standstill, the gain (Kp) of the posi-
tion controller can be increased with ps02 KP zero speed position ctrl at a profile
setpoint speed of 0 rpm.

 Loading...
Loading...










