The values of co10 have the following meaning:
Linear 2 points
external pre con-
trol
Linear interpolation of the position, no internal pre-
control of speed and torque. The pre-control can be
done externally via co17 and co18.
B-spline interpolation via the last n points
Initialization with actual values
Initialization with setpoints
Do not set the setting of the function interpolation mode to value "0: lin-
ear 2 points“ during axis operation.
➢ The speed pre-control value calculated before the changeover is no
longer updated and also not deleted, but remains.
➢ In general, jumps / jerks are to be expected when adjusting during
active positioning.
The interpolation results in a signal delay, which is calculated as follows:
Deceleration = cycle time (fb10) * (number of calculation points (co10) – 1)
Formula 1: Signal delay by interpolation
Example:
With a cycle time of 1ms and B-spline interpolation of 4 points, there is a delay of
1ms * (4-1) = 3ms.
The setpoint speed and the required set torque are directly derived from the set po-
sitions. The values are directly interpolated to the 250us grid of position and speed
controller.
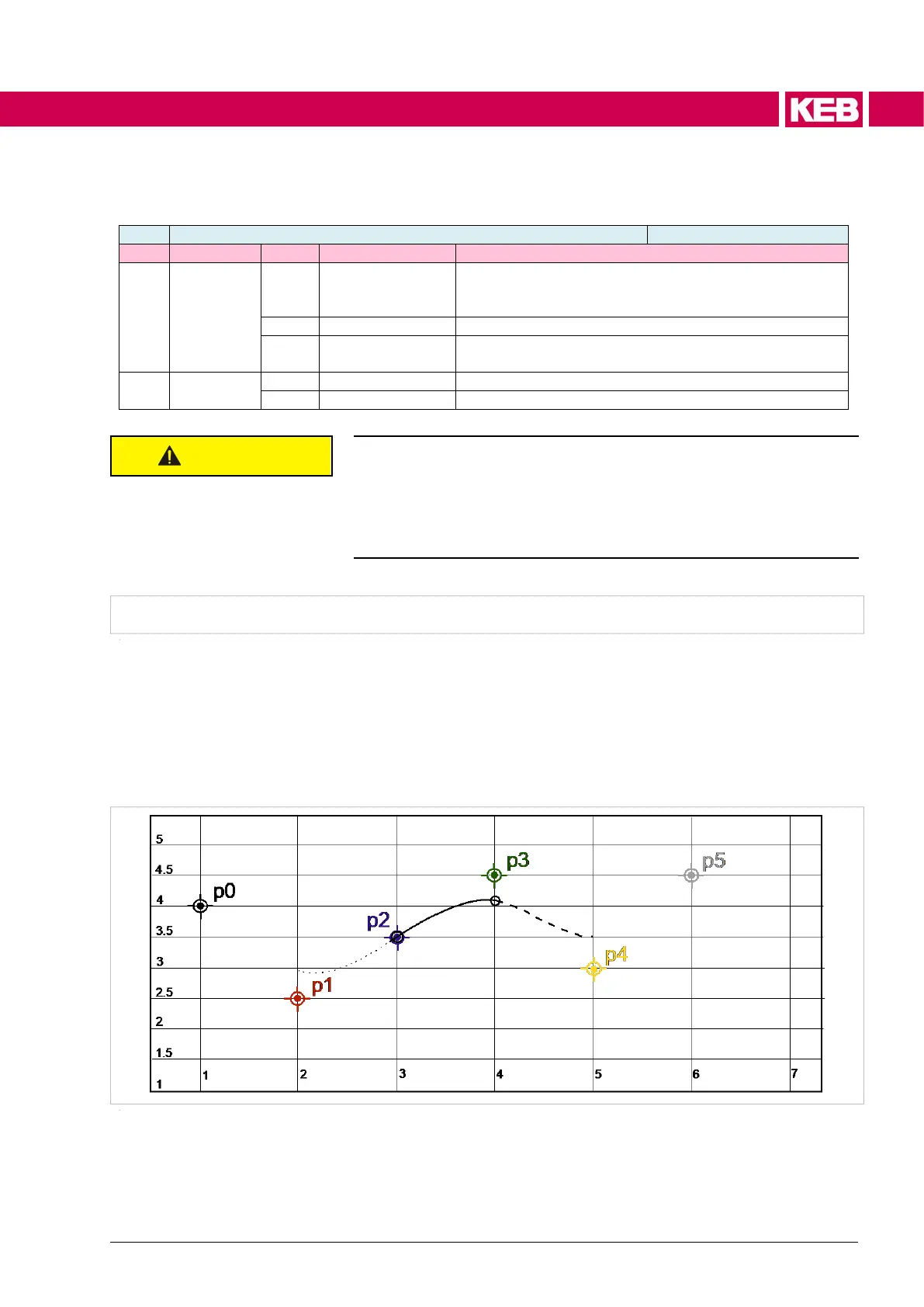
Figure 51: Example interpolation
If the number of grid points is increased withco10, possible errors in the set profile
will be compensated better, but the set profile is also slightly straightened thereby.
Due to the minimum required 4 points, the position setpoint is delayed by the triple
cycle time in fb10. The cycle time is three times between the 4 points. Each addi-
tional point corresponds to a delay of another cycle time in fb10.

 Loading...
Loading...










