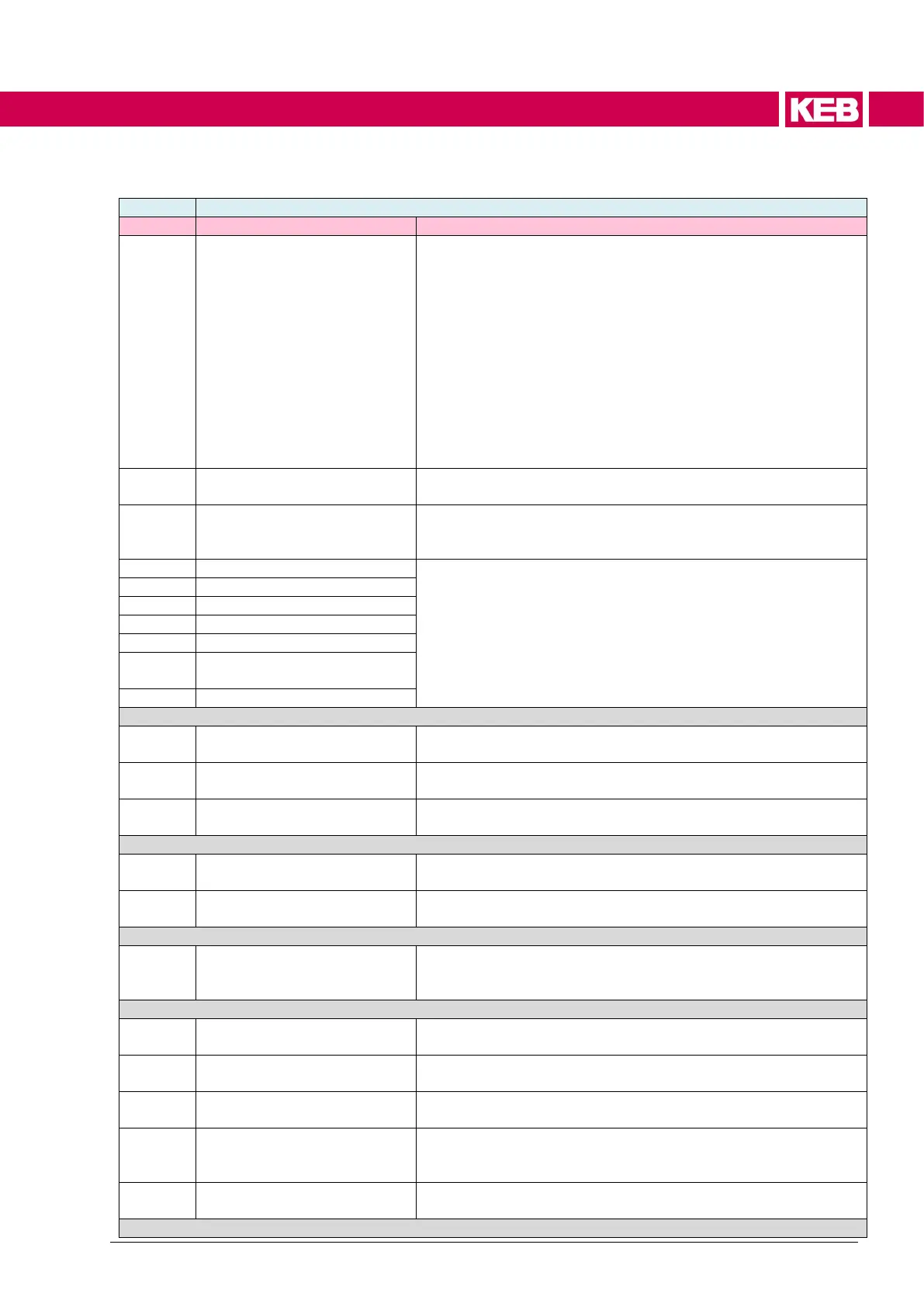
EnDat: encoder sent battery
warning
If the battery is disconnected and the device is switched off
and on again, the encoder only sends a warning in ec19, bit 3.
However, the position may be wrong, i.e. the revolutions are
set to another value.
In order to prevent starting with the wrong position, this error is
triggered when the encoder sends a battery warning during ini-
tialisation.
If the battery voltage falls below the limit value during operation
(i.e. with the main voltage switched on), the encoder only
sends a warning, which is also displayed as warning by the en-
coder. The whole revolutions are retained, i.e. the position
value is correct.
The read back data does not match the previously stored data.
Encoder defective.
EnDat: timeout at reading ad-
ditional information
While reading the additional information, the communication is
interrupted, e.g. due to a break of the core in the encoder ca-
ble.
EnDat: CRC error position
Error in Endat communication during operation. But it was al-
ready ok. Possible causes are EMC disturbances or defect of
encoder cable, encoder evaluation or encoder.
EnDat: CRC error add.info 1
EnDat: CRC error add.info 2
EnDat: encoder error type 1
EnDat: communication not
started
EnDat: comm. not finished
Position correction function
position difference too high
Position difference between incremental and absolute (digital)
position too large.
difference in rounds occured
Difference between counted revolutions and revolutions of the
(multiturn) encoder has occurred.
Sin/Cos: position difference
to absolute position too high
Position difference between incremental and absolute (analog)
position too high for SinCos encoder.
Monitoring of the 1Vss signals
1Vpp incremental signals:
signal error
Error 1Vpp incremental signals (one or both signals)
1Vpp absolute signals: signal
error
Error 1Vpp absolute signals with SinCos encoder (one or both
signals)
Sin/Cos+SSI: no signals de-
tected in init
Already during the initialization, not all encoder signals have
been recognized (recognized encoder types are displayed in
ec17).
Sin/Cos: no reference mark
detected
Reference signal not recognized (inc per revolution could be
wrong too).
Sin/Cos: adjusted signal peri-
ods too small
The adjusted increments per revolution are too small (com-
pared to the distance between two detected reference signals).
Sin/Cos: adjusted signal peri-
ods too high
The adjusted increments per revolution are too high (compared
to the distance between two detected reference signals).
Already during the initialization, not all encoder signals have
been recognized (recognized encoder types are displayed in
ec17).
Sin/Cos: reference signal not
recognised anymore
Reference signal is not recognized since some revolutions, but
it was already valid.

 Loading...
Loading...










