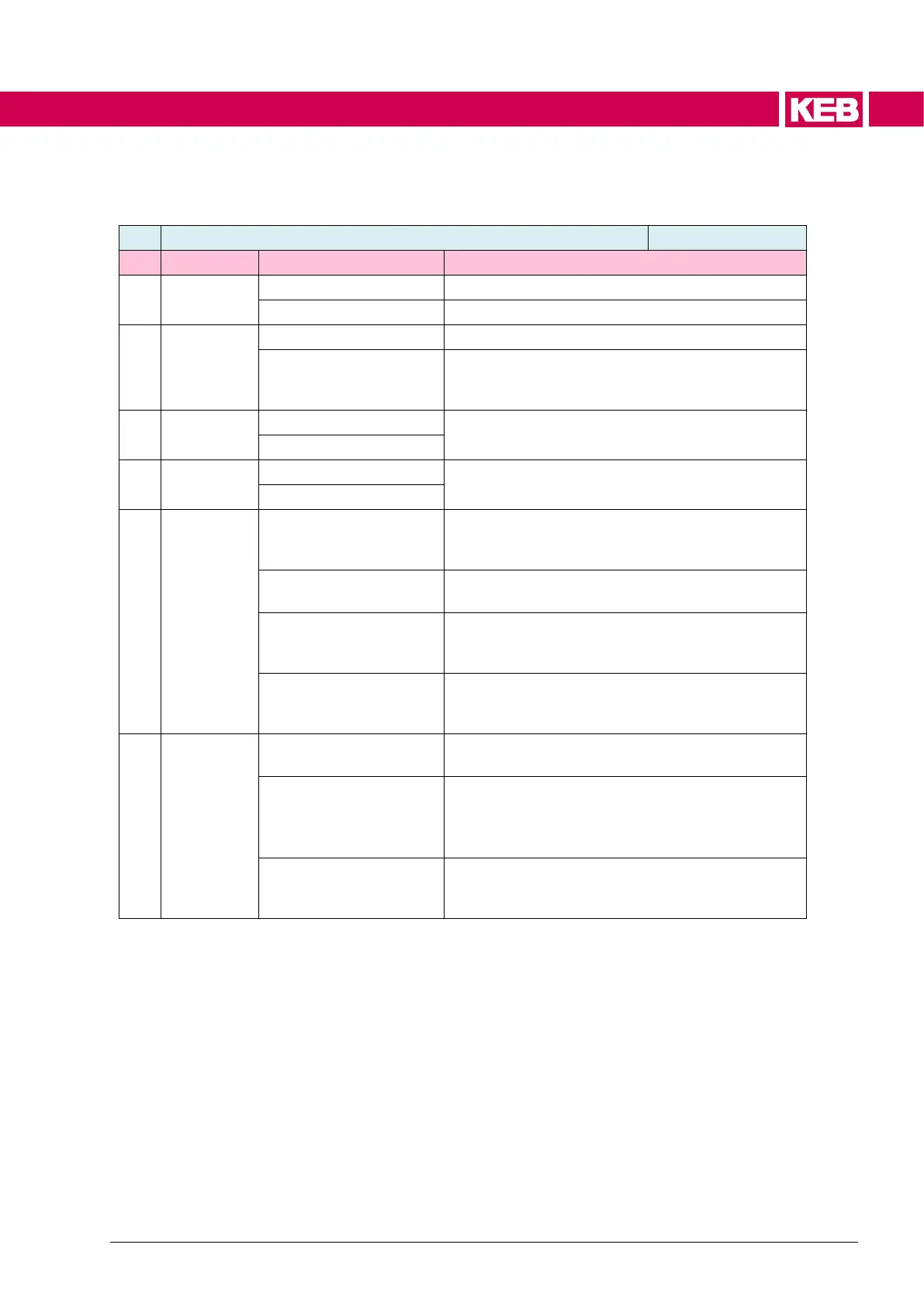
The bits in ps60 have the following functions:
ps48 is acceleration/deceleration setting for all di-
rections of rotation (only effective if linear ramps
are selected, otherwise ps48…ps51) always apply
Only effective if no positioning is active.
See also graphic under co60
Only effective if no positioning is active.
See also graphic under co60
The acceleration and deceleration for each direc-
tion of rotation is defined separately in the corre-
sponding parameters.
The value in ps48 defines the acceleration as well
as the deceleration for both directions of rotation
The values in ps48 and ps50 also define the decel-
eration for the respective direction of rotation.
ps49 and ps51 have no function
The values in ps48 and ps49 also define the accel-
eration or deceleration for the reverse direction of
rotation.ps50 and ps51 have no function
The value in ps52 determines all jerk values. Pa-
rameters ps53..ps59 have no function
ps52 for acc jerk ls [s-3] defines all acceleration
jerk values, ps54 for dec jerk hs [s-3] defines all de-
celeration jerk values.
ps53 and ps55..ps59 have no function.
The four jerk values for the reverse direction of ro-
tation are taken over from the forward direction of
rotation. ps56..ps59 have no function
In addition to the ramps in the Ps parameters, fault reaction, shutdown or standard
ramps can also become effective. Observe setting of co32.
The ramp generator is described in more detail in chapter 4.8.2.4 Ramp generator
Velocity mode.

 Loading...
Loading...










