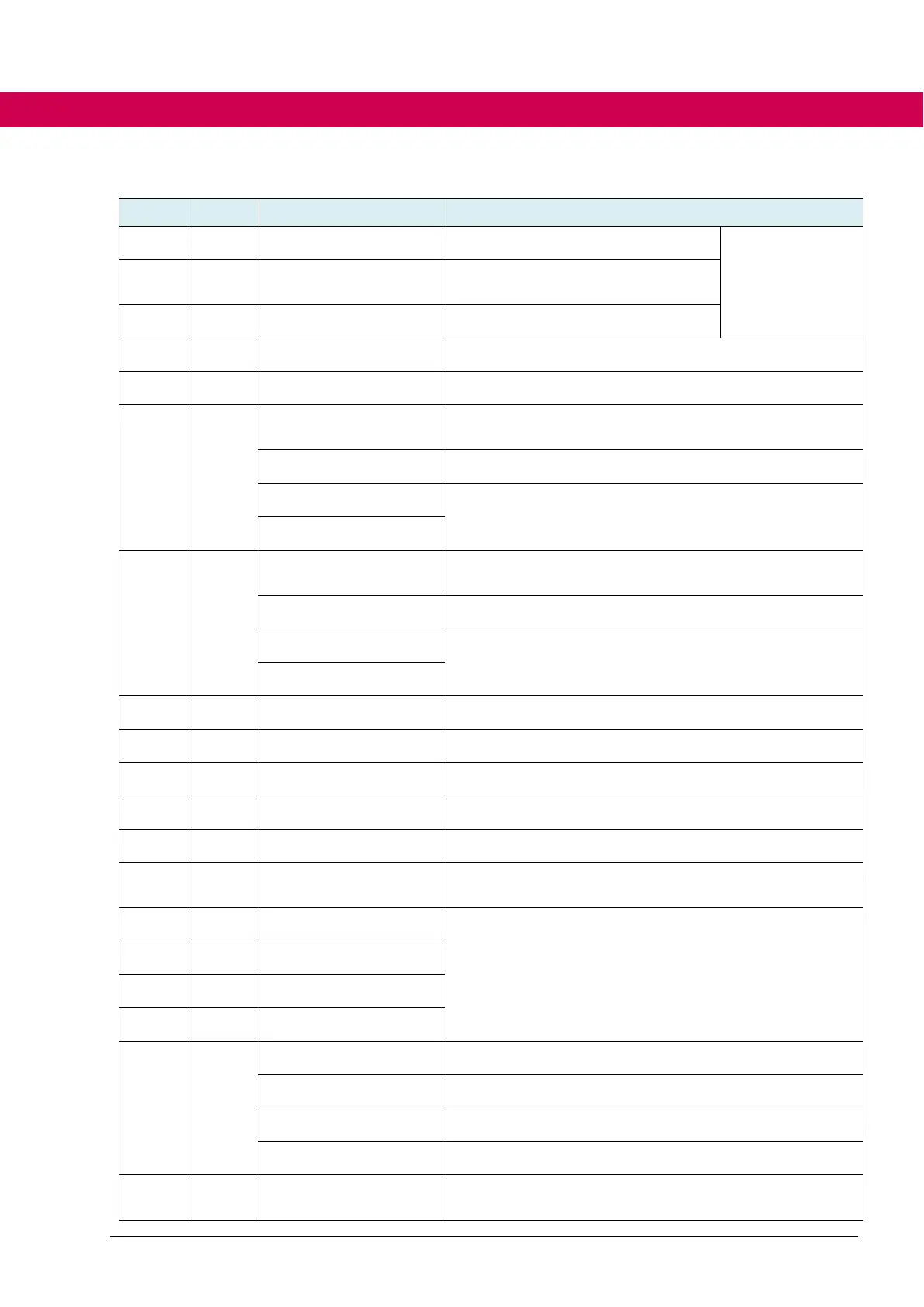
Overview of the ru parameters
State of the internal digital outputs
(=> Chapter 7.2
Digital outputs)
State of the outputs
(at the end of the processing blocks)
Reference torque (output of the speed controller)
heatsink temperature val-
ues
Structure of heatsink temperature values
Heatsink temperature display
From housing size 7, several heatsink temperatures are
measured, displayed and evaluated for overtemperature
protection
internal temperature PU
values
Structure of heatsink temperature values
internal temperature PU 1
Internal temperature power unit
internal temperature PU 2
From housing size 7, several internal temperatures are
measured, displayed and evaluated for overtemperature
protection
internal temperature PU 3
Short-term overload level
Motor temperature (respectively state of the PTC)
Continuous overload counter
State of the internal communication bus (SACB bus)
Level of the electronic motor protection relay
Position value of the encoder after the gear factor
ec24/ec25
Torque limits, which result from the settings in cs12 … cs16
or in the profile parameters 0x60E0 / 0x60E1.
The final limits can be different due to the influence of the
limiting characteristic.
Structure of position values of encoder 1
Direct position value of the encoder 32bit without sign
Upper 16bit of the direct position value
Lower 16bit of the direct position value
dig. input terminal state
State of the digital inputs (before processing)
(=> 7.1 Digital Inputs)

 Loading...
Loading...










