Additionally at synchronous motors the current controller can be adjusted depend-
ing on the saturation.
For motors that are driven much above saturation, not only the EMF, also the in-
ductance changes. Thus the current controller for the saturation is parameterized
too hard. An automatic adjustment of the current controller gain can be reached
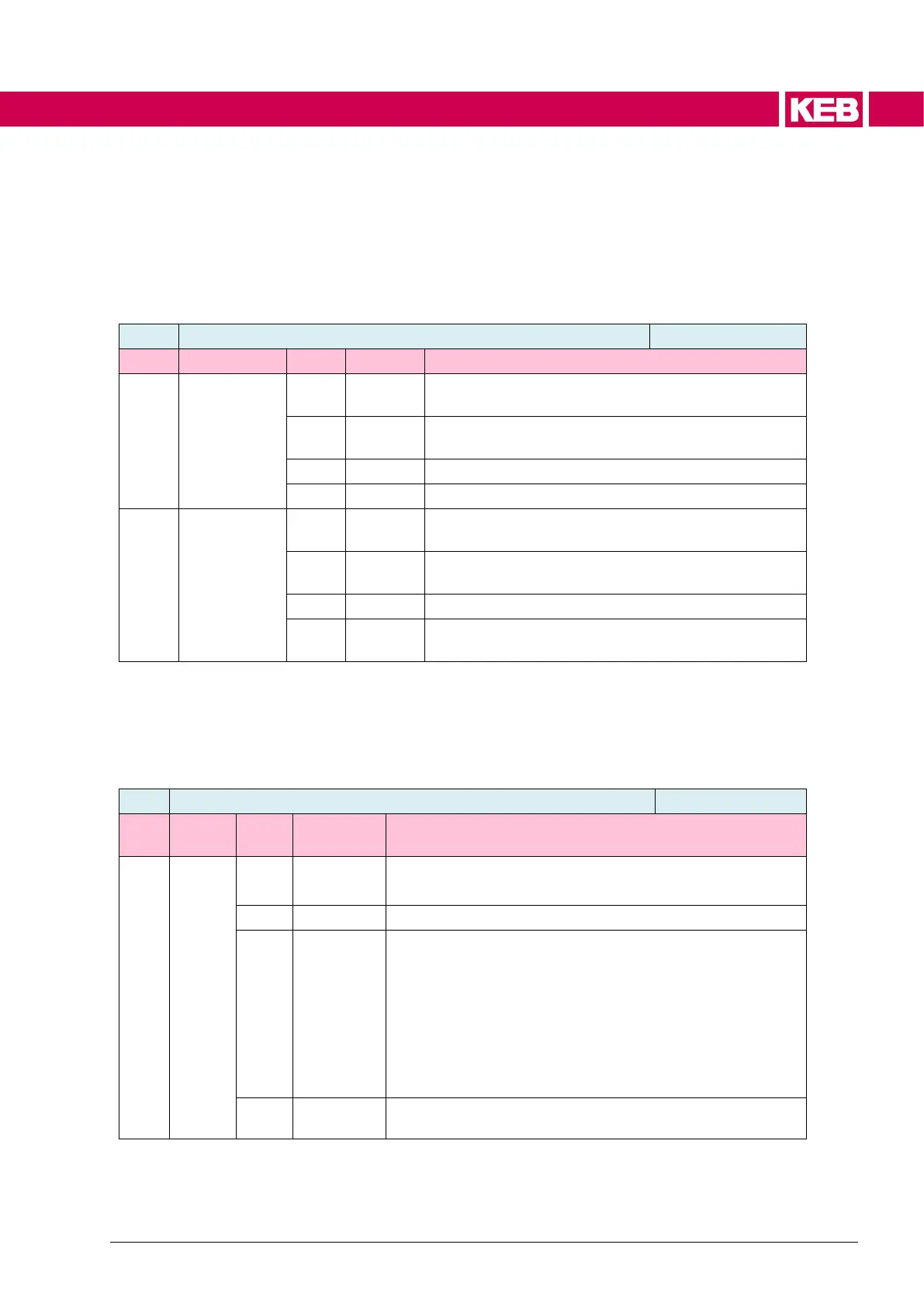
with this functions in parameter ds04 current mode.
Notes (only for synchronous motors)
no saturation-dependent current controller adjust-
ment
Proportional and integral gain of the Iq-controller are
adjusted
Only proportional gain of Iq-controller is adjusted
No saturation-dependent current controller adjust-
ment
Proportional and integral gain of the Id-controller are
adjusted
Only proportional gain of Id-controller is adjusted
The saturation characteristic in dr and mo parameters must be parameterized ac-
cordingly to activate this function (=> Chapter 6.2.13 Saturation characteristic
(SM)).
This parameter is adjusted automatically depending on the motor type.
Only in very special applications it may be useful to change this value
Notes (only for synchronous motors)
Current controller for the d-axis has always priority.
Initial setting for SM
compres-
sion + dyn.
decoupling
The priority also changes the type of decoupling. This en-
tails advantages when operating in the voltage limit. The
maximum voltage controller is to be considered only as
supportive. The advantage for IPM motors is an optimal
operating point for the maximum torque. In addition, this
current control mode is more tolerant against parameter
errors (inductance). This is utilized, e.g. for motors with
high saturation. In this mode it is imperative to set the
maximum Id current in parameter dr29.
The current controller priority is changed depending on the
operating point. Initial setting for ASM