The measurement of the torque offset must be carried out at no-load operation in
static operation in order to avoid measurement errors due to acceleration torques.
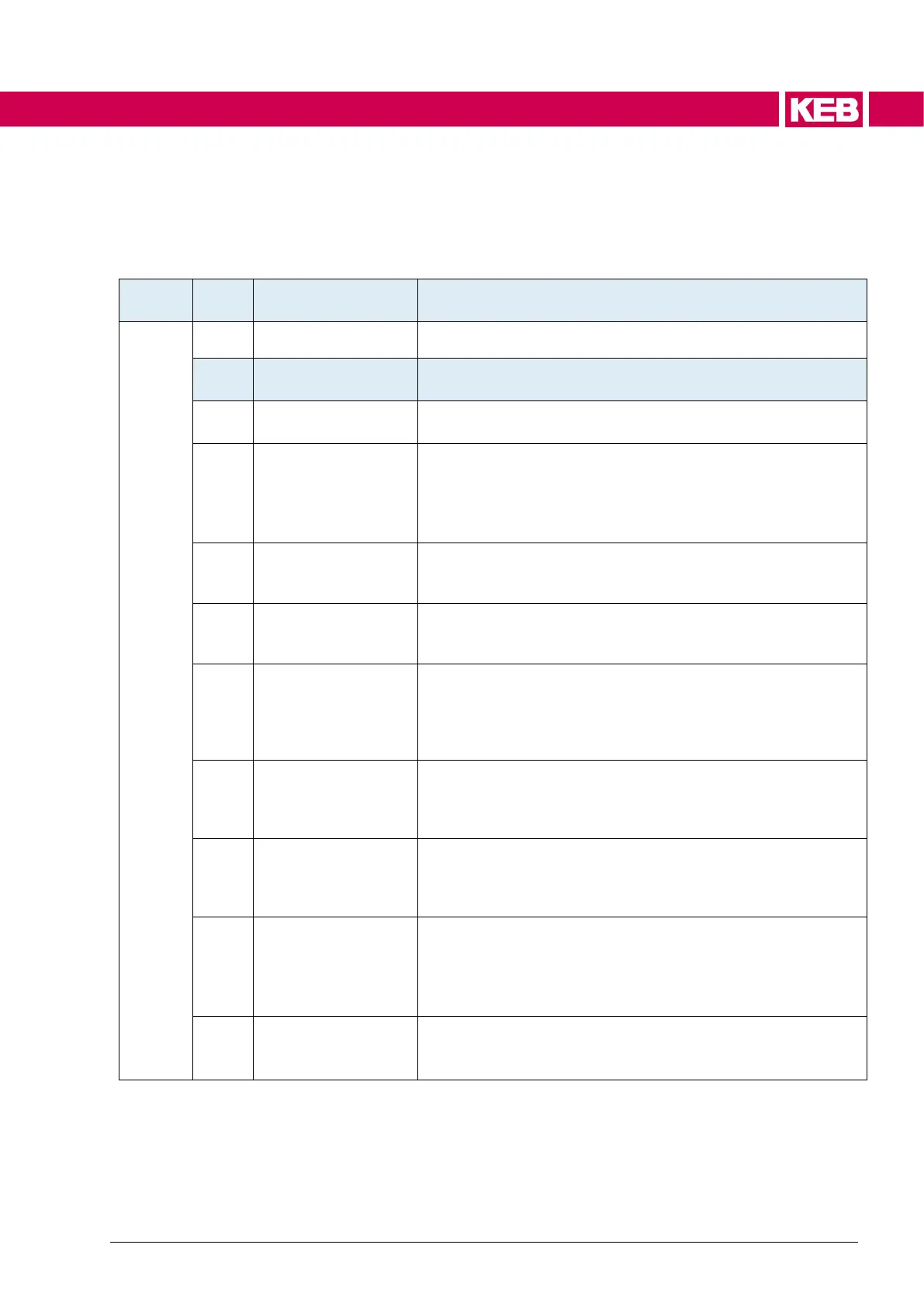
Subindices 5...9 determine how static operation is to be defined and monitored.
torque offset ident
config
Configuration of the torque offset identification
Speed point 1 (start speed of the torque offset characteristic)
in % dr04 rated speed
Speed point 16 (end speed of the torque offset characteristic)
in % dr04 rated speed
Notice: the maximum speed vl05 vl velocity max amount for
can be exceeded during the identification, only the end speed
is valid as limitation.
Selection of the torque value for the offset identification: 0: raw
=> non-smoothed torque value
1: PT1 filtered => value smoothed with PT1 filter (ru81)
Selection of the speed source for the offset identification: 0:
raw - not smoothed (ru08)
1: PT1 filtered - PT1 smoothed value (ru85)
ident max torque de-
viation [5]
Permitted deviation of the minimum / maximum torque values
from the average value of the measurement in % dr09 rated
torque
(Description Stability monitoring see chapter 6.2.9.2 Execution
of the torque offset identification)
ident max speed de-
viation [6]
Permitted speed deviation from the setpoint speed of the iden-
tification in % dr04 rated speed
(Description Stability monitoring see chapter 6.2.9.2 Execution
of the torque offset identification)
ident torque number
of samples [7]
Number of values whose average value is taken as torque off-
set
(Description of the measurement see chapter 6.2.9.2 Execu-
tion of the torque offset identification)
ident speed stability
check duration [8]
Time in ms wherein the speed must remain within the limits of
mo38[6] by way that the speed is considered stable and the
offset measurement can be started
(Description of the measurement see chapter 6.2.9.2 Execu-
tion of the torque offset identification)
ident speed max set-
tle duration [9]
Maximum allowed time for speed stabilization
(Description of the measurement see chapter 6.2.9.2 Execu-
tion of the torque offset identification)
The default values of mo38 should allow problem-free identification in most appli-
cations:
• start speed [1] = 5 % dr04
• end speed [2] = 130 % dr04
• ident torque source [3] = 1: PT1 filtered
• ident speed source [4] = 0 : raw

 Loading...
Loading...










