In co61 bit 6…8 can be selected, which torque limit shall be active during the wait-
ing time (pn45 fault reaction time) after reaching the final speed (pn47 fault reac-
tion ref velocity).
With co61 bit 9 and 10 it can be defined whether the change of the torque limits
should be abrupt or slope-limited.
Stop functions such as Quickstop, Shut Down, Disable Operation, etc. can use the
error response ramp to stop. Such a "stop process" can also be a reaction to an
external error event. For this reaction the same options shall be available for torque
changes as during "FAULT REACTION ACTIVE". Bits 11 and 12 can be pro-
grammed accordingly for this.
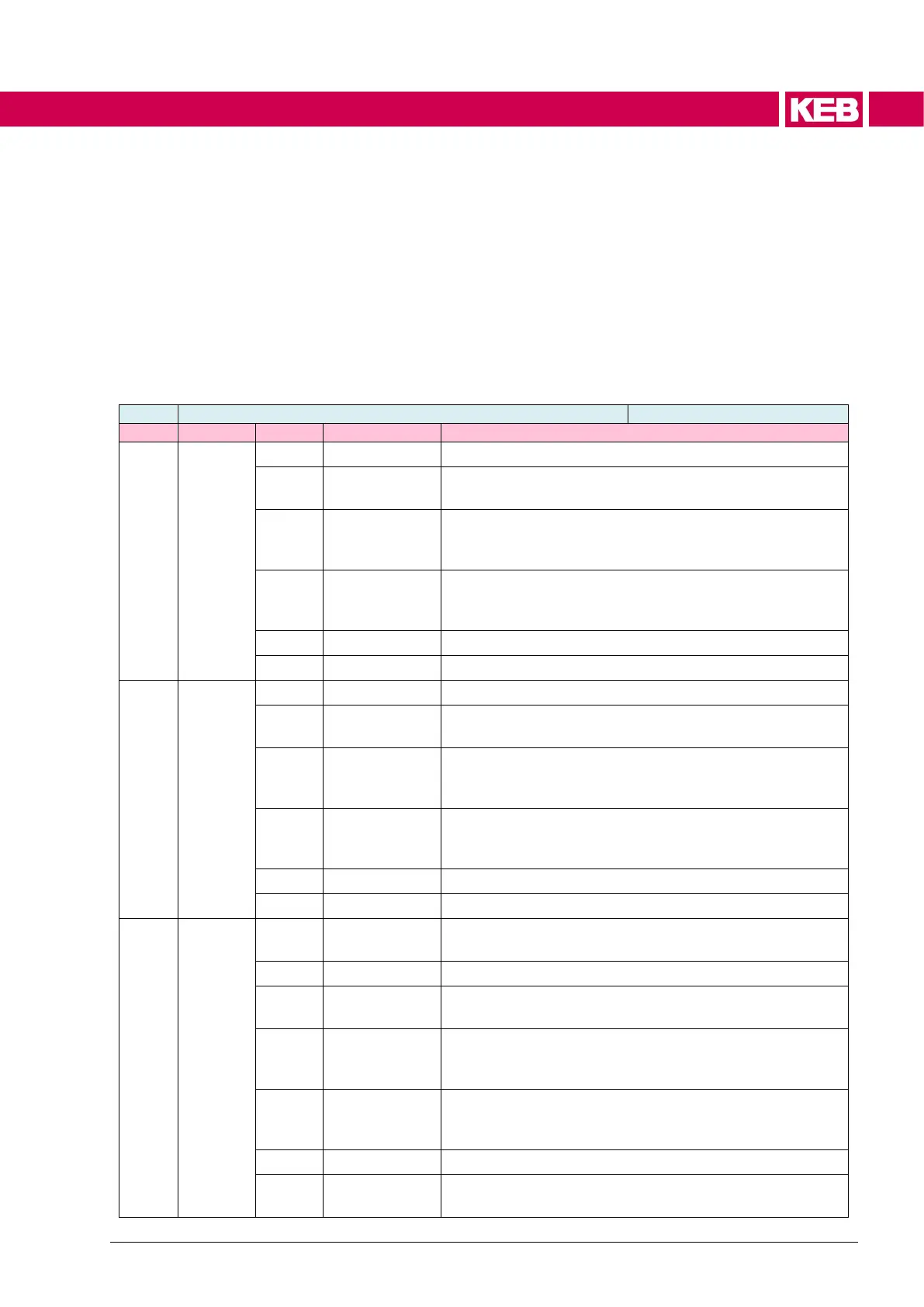
all torque limits valid as always
Torque limit is cs12
cs13…cs16 without function
cs15 applies to positive direction of rotation
cs16 applies to negative direction of rotation
cs12 without function
max torque
charact (dr
group)
cs12…cs16 without function
only limiting characteristic effective
source
fieldbus
watch-
dog
all torque limits valid as always
Torque limit is cs12
cs13…cs16 without function
cs15 applies to positive direction of rotation
cs16 applies to negative direction of rotation
cs12 without function
max torque
charact. (dr
group)
cs12…cs16 without function
only limiting characteristic effective
If the setpoint ramp has reached zero, the same torque
limit as in deceleration is active
all torque limits valid as always
Torque limit is cs12
cs13…cs16 without function
cs15 applies to positive direction of rotation
cs16 applies to negative direction of rotation
cs12 without function
max torque
charact. (dr
group)
cs12…cs16 without function
only limiting characteristic effective

 Loading...
Loading...










