X24 P2, X25 P1, communication
Control section type Function
ECONOMY sercos III, EtherCAT (S3)
Communication module for sercos III and EtherCAT field bus systems
BASIC Multi-Ethernet (ET)
With the Multi-Ethernet communication module "ET", drive controllers can be integrated in differ‐
ent Ethernet field bus systems (e.g. sercos III, EtherCAT, EtherNet/IP or PROFINET IO).
ADVANCED ● sercos III master (CC)
Is used as "master" for cross communication (CC = Cross Communication)
● Multi-Ethernet (ET)
With the Multi-Ethernet communication module "ET", drive controllers can be integrated in
different Ethernet field bus systems (e.g. sercos III, EtherCAT, EtherNet/IP or
PROFINET IO).
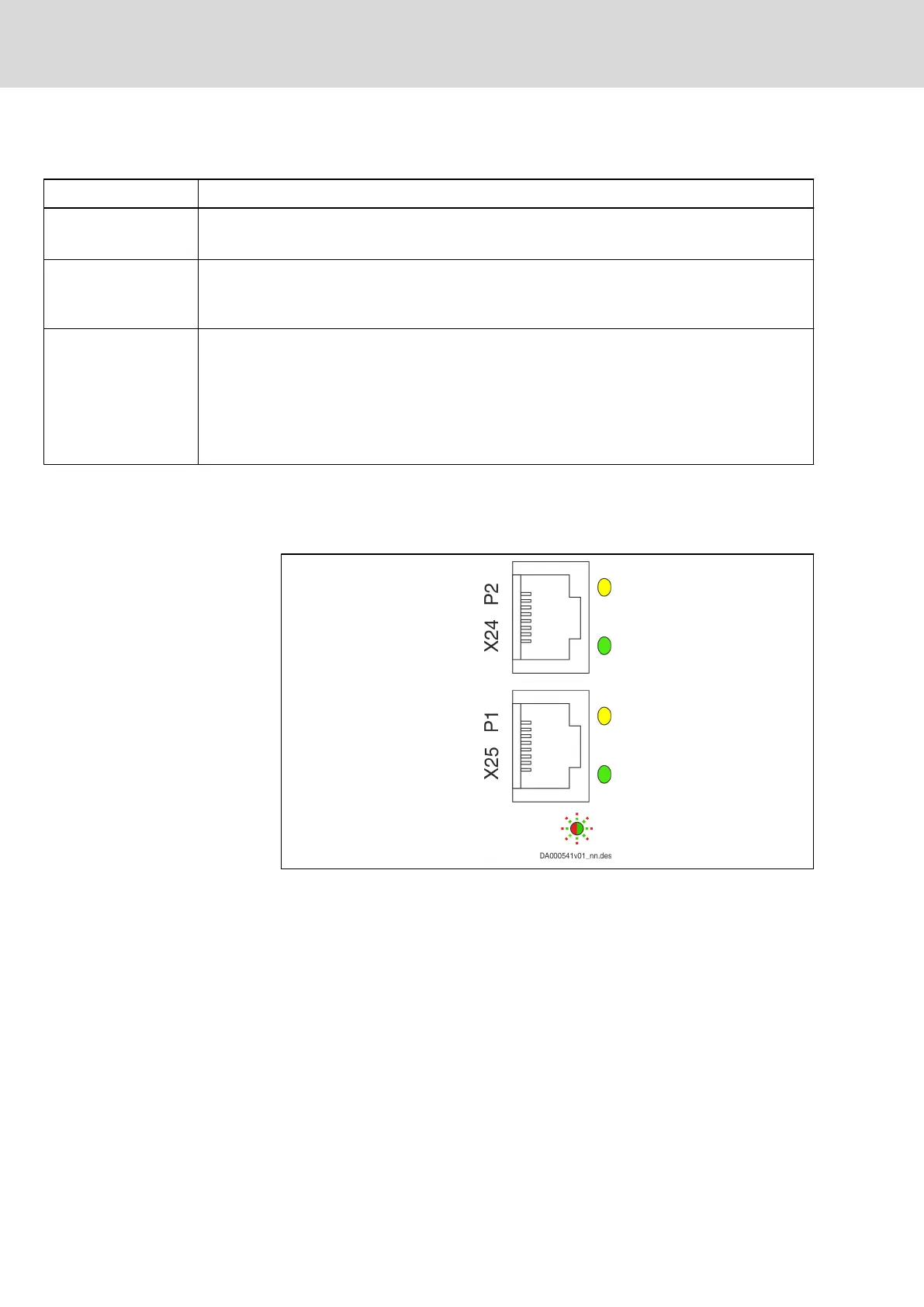
Tab. 6-11: X24 P2, X25 P1, communication
Description
The connection point complies with IEEE 802.3 standard.
Tab. 6-12: Connection point
P1, P2
P1 means "Port 1" and P2 means "Port 2". Thereby, the error counter of the
firmware can be directly assigned to a Port.
Connection
sercos III, EtherNet/IP, PROFINET:
● Input: arbitrary
● Output: arbitrary
EtherCAT:
● Input: X25 P1
● Output: X24 P2
Bosch Rexroth AG DOK-INDRV*-HCS01******-PR05-EN-P144/341
Rexroth IndraDrive CsDrive Systems with HCS01
Mounting and installation
 Loading...
Loading...