3.3 Running Mode
3-6
3.3 Running Mode
When the inverter is turned on, it automatically enters Running mode in which you can:
(1) Monitor the running status (e.g., output frequency and output current),
(2) Configure the reference frequency and other settings,
(3) Run/stop the motor,
(4) Jog (inch) the motor,
(5) Switch between remote and local modes, and
(6) Monitor light alarms
3.3.1 Monitoring the running status
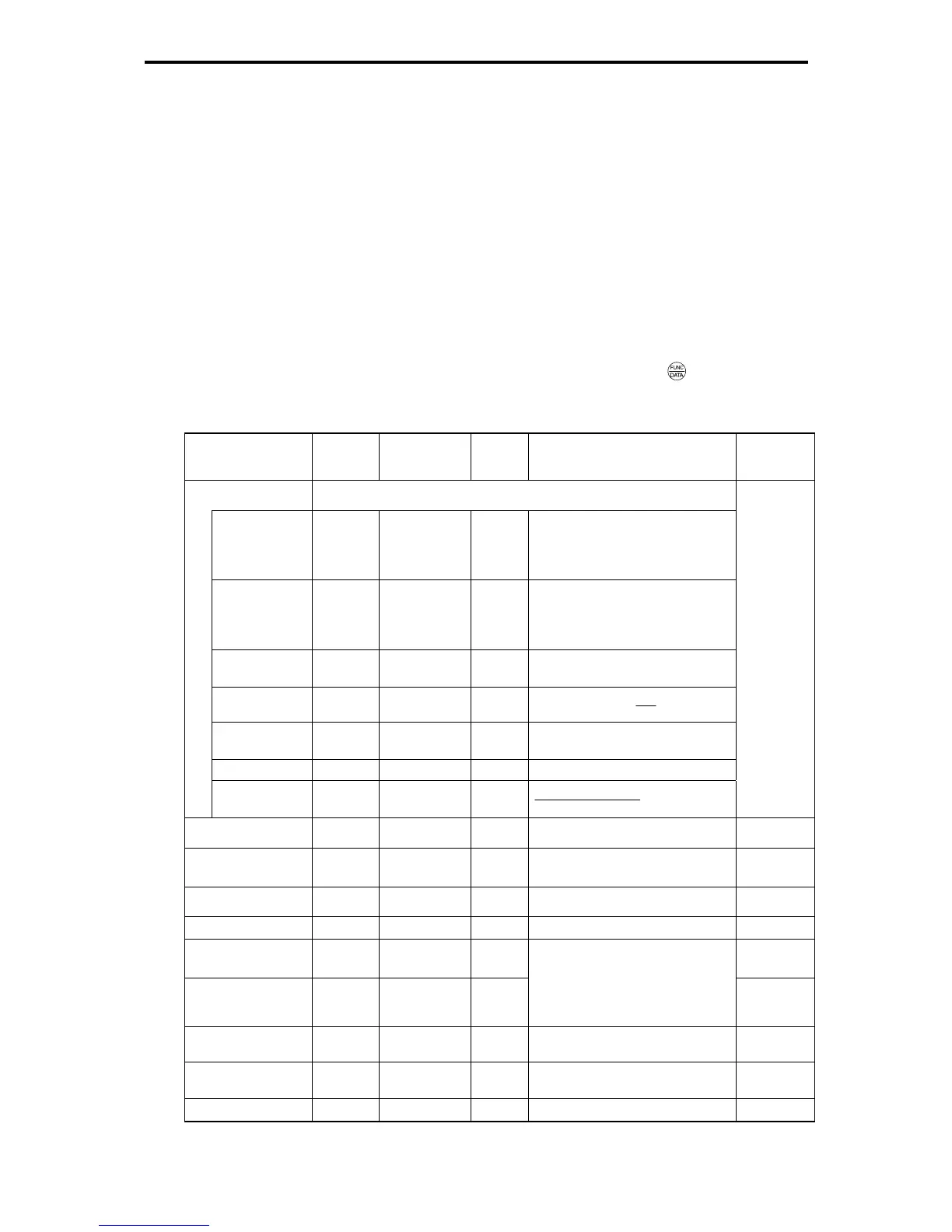
In Running mode, the fourteen items listed below can be monitored. Immediately after the inverter is
turned on, the monitor item specified by function code E43 is displayed. Press the
key to switch
between monitor items.
Table 3.3-1 Monitoring Items
Monitor item
Display
sample
(*1)
LED indicator Unit
Meaning of displayed value
Function
code data
for E43
Speed monitor
Function code E48 specifies what to be displayed on the LED monitor
and LED indicators.
0
Output
frequency 1
(before slip
compensation)
5*00
HzAkW Hz
Frequency actually being output
(E48 = 0)
Output
frequency 2
(after slip
compensation)
5*00
HzAkW Hz
Frequency actually being output
(E48 = 1)
Reference
frequency
5*00
HzAkW Hz
Reference frequency being set
(E48 = 2)
Motor speed
1500
HzAkW r/min
P01
120
×frequency Output
(E48 = 3)
Load shaft
speed
30*0
HzAkW r/min
Output frequency (Hz) X E50
(E48 = 4)
Line speed
30*0
HzAkW m/min
Output frequency (Hz) X E50
(E48 = 5)
Display speed
(%)
5*0
HzAkW %
100×
frequency Output
frequency Maximum
(E48 = 7)
Output current
1"34
HzAkW A
Current output from the inverter in
RMS
3
Output voltage
(*2)
200u
HzAkW V
Voltage output from the inverter in
RMS
4
Calculated torque
50
HzAkW %
Motor output torque in %
(Calculated value)
8
Input power
1*25
HzAkW kW
Input power to the inverter
9
PID command
(*3, *4)
1*0*
HzAkW -
10
PID feedback
amount (*3, *5)
)0*
HzAkW -
PID command and its feedback
converted into physical quantities
of the object to be controlled.
Refer to function codes E40 and
E41 for details.
12
PID output (*3, *4)
10**
HzAkW %
PID output in % as the maximum
frequency (F03) being at 100%
14
Load factor (*6)
50;
HzAkW %
Load factor of the motor in % as
the rated output being at 100%
15
Motor output (*7)
)85
HzAkW kW
Motor output in kW
16

 Loading...
Loading...








