5.3 Code Index by Purpose
5-52
[3] PID dancer control
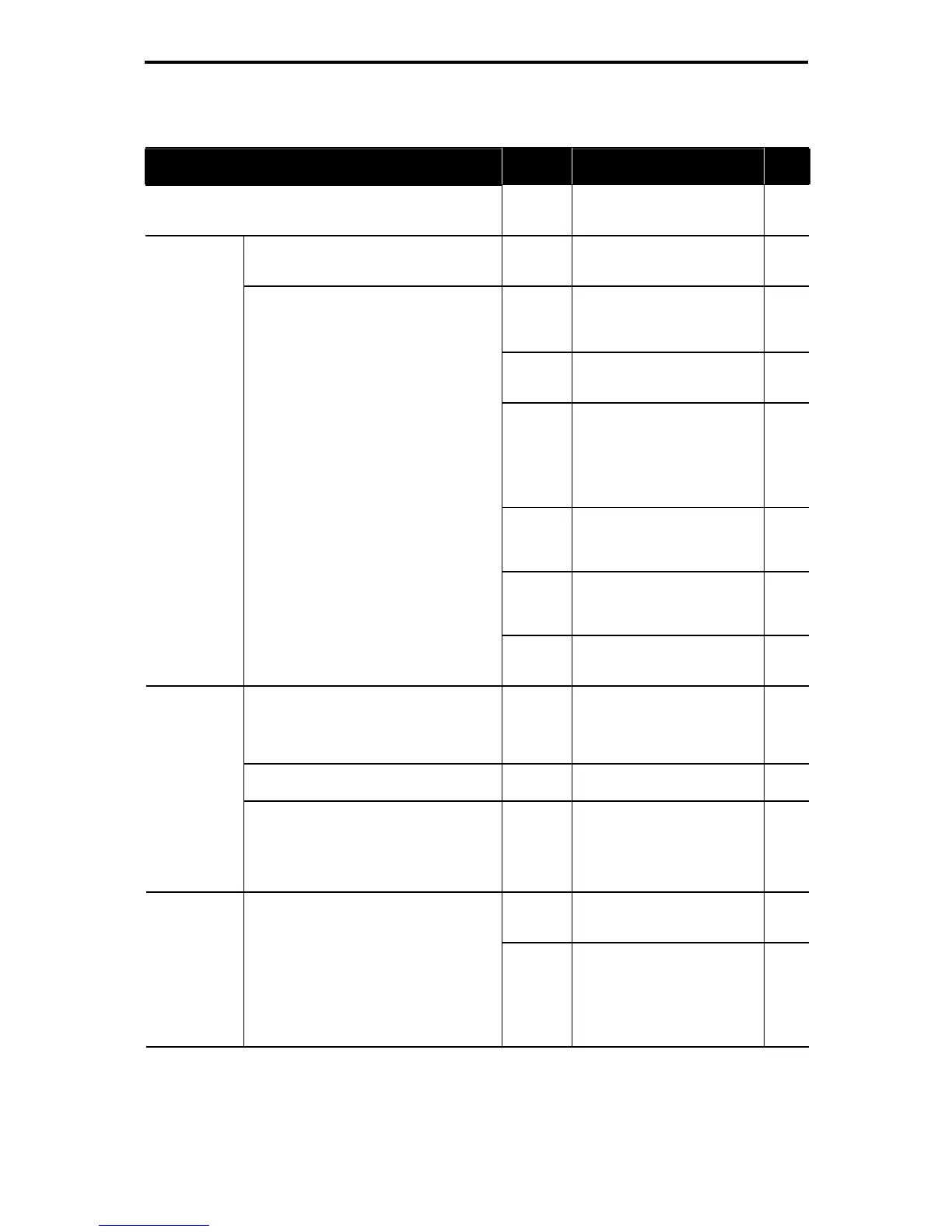
Table 5.3-20
To
Function
code
Name
Refer to
page:
Exercise speed control for dancer positioning, etc.
J01
J62
PID Control
(Mode selection)
(PID control block selection)
5-214
5-228
Specify a PID command using the keypad.
J02
J57
PID Control
(Remote command)
(Dancer reference position)
5-215
5-228
J02
E61
E62
E63
PID Control (Remote command)
Terminal [12] Extended Function
Terminal [C1] Extended Function
Terminal [V2] Extended Function
5-215
5-162
C51
C52
Bias (PID command 1)
(Bias value)
(Bias base point)
5-174
C32
C34
C37
C39
C42
C44
Analog Input Adjustment for:
[12] (Gain)
[12] (Gain base point)
[C1] (Gain)
[C1] (Gain base point)
[V2] (Gain)
[V2] (Gain base point)
5-173
C31
C36
C41
Analog Input Adjustment for:
[12] (Offset)
[C1] (Offset)
[V2] (Offset)
5-173
C33
C38
C43
Analog Input Adjustment for:
[12] (Filter)
[C1] (Filter)
[V2] (Filter)
5-173
PID command
Specify a PID command with analog input.
C35
C45
Analog Input Adjustment for:
[12] (Polarity)
[V2] (Polarity)
5-173
Specify a PID command with UP or DOWN
command.
J02
E01 to E09
H61
PID Control (Remote command)
Terminal [X1] to [X9] Functions
(UP, DOWN)
UP/DOWN Control (Initial
frequency setting)
5-215
5-122
5-62
Specify a PID command via a communications
link.
J02 PID Control (Remote command) 5-215
PID command
Define different PID commands beforehand and
switch them with the multi-frequency selection
signals.
J02
E01 to E09
C08
C12
C16
PID Control (Remote command)
Terminal [X1] to [X9] Functions
(SS4, SS8)
Multi-frequency 4
Multi-frequency 8
Multi-frequency 12
5-215
5-122
5-166
E61
E62
E63
Terminal [12] Extended Function
Terminal [C1] Extended Function
Terminal [V2] Extended Function
5-162
PID feedback Set up analog input feedback for PID control.
C32
C34
C37
C39
C42
C44
Analog Input Adjustment for:
[12] (Gain)
[12] (Gain base point)
[C1] (Gain)
[C1] (Gain base point)
[V2] (Gain)
[V2] (Gain base point)
5-173

 Loading...
Loading...








