6.2.3.5 System offset
6.2.3.5.1 General
The knowledge of the system position is mandatory necessary for the operation of
a synchronous motor (also called systemoffset). The system position detects the
mechanical difference between rotor position and position information of the in-
stalled encoder system.
➢ If the system offset is incorrectly measured or preset, the syn-
chronous motor can overspeed uncontrollable.
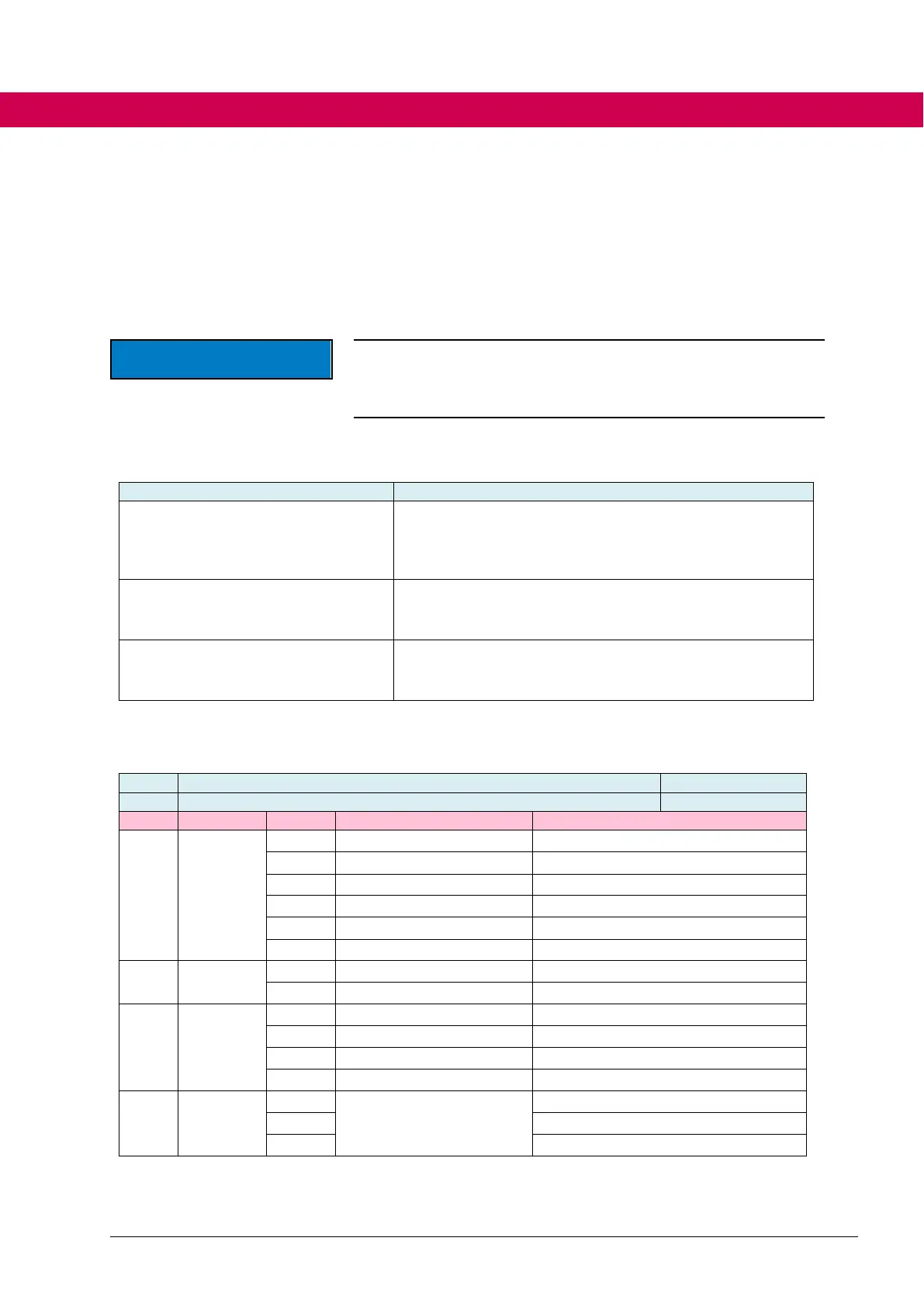
The following cases must be differentiated:
Operation with an encoder which pro-
vides an absolute position infor-
mation per mechanical or electrical
revolution
System position must be determined only once
System position measurement is started/controlled by
dd00
Operation with an encoder without
absolute information
The system position must be redetermined at least after
power on or with each modulation release. System posi-
tion measurement is started/controlled by dd00
Operation without encoder (SCL)
System position must be redetermined at each modulation
release. System position measurement is started/con-
trolled by dd01
The determination mode of the system offset is adjusted in parameters dd00 (oper-
ation with encoder) or dd01(SCL). Not all modes are available in both operating
modes.

 Loading...
Loading...










